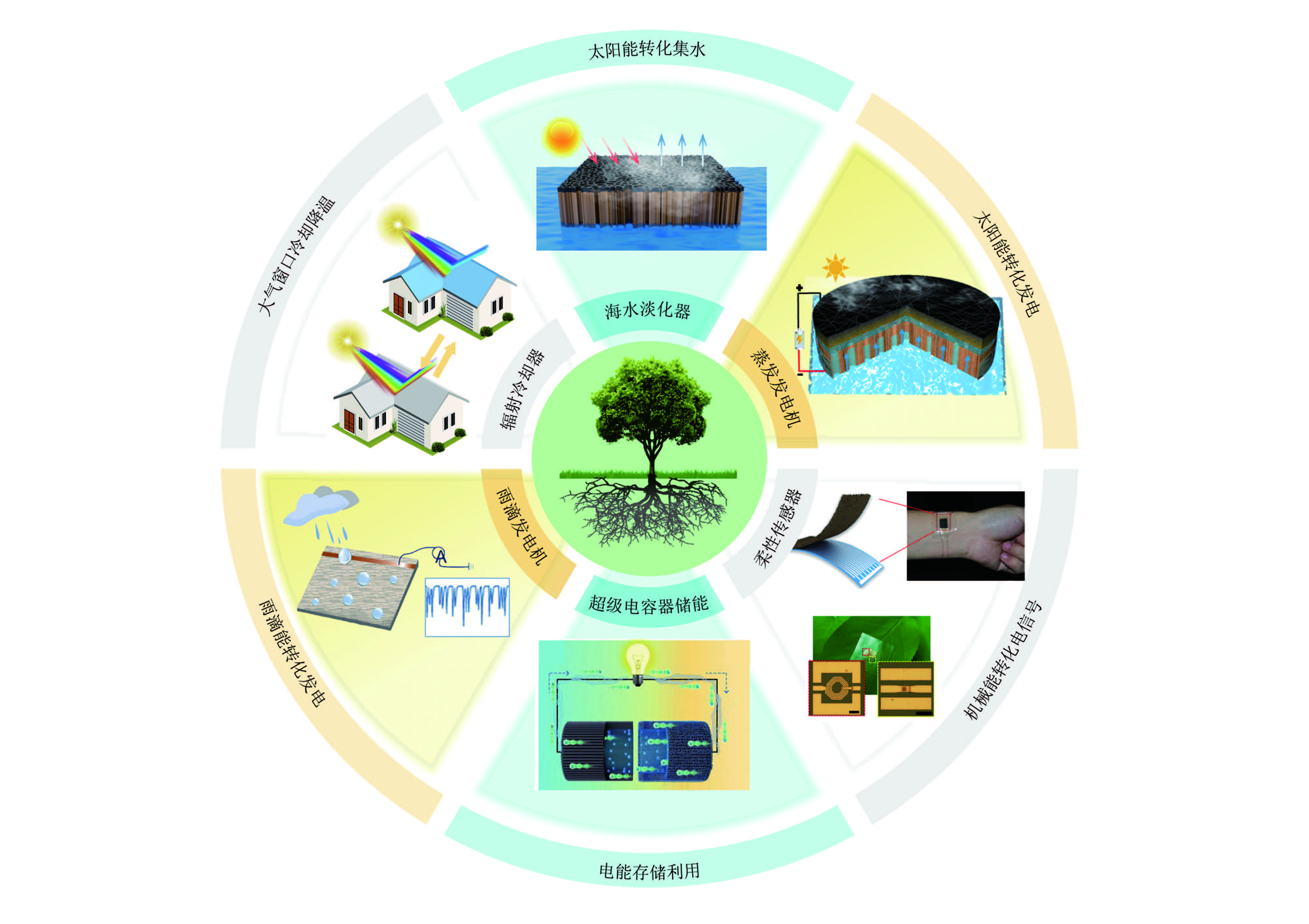
化石能源的过度消耗造成全球能源与环境危机,促使绿色可再生能源材料的开发成为研究热点。木材由于其多尺度结构可设计性以及可再生性,在多种环境能源收集与转换领域中具有很大的应用潜力。为此,对木基能源材料的功能构建和应用进展进行系统整合,从光热、水能、机械能和热辐射等多类型自然能源利用的机理、结构调控策略、关键性能特征入手,归纳出不同应用场景下材料的设计思路。经过对多元能量耦合机制、界面调控途径以及跨尺度结构构建方法的归纳,揭示了木基材料完成多能转换的内在优势。在此基础上,对木基能源材料在分布式供能、水资源利用、环境热管理和电信号处理等方面的应用潜力进行讨论。最后提出木基能源材料未来在结构耐久性、功能集成度和规模化制造等方面的关键发展方向,为木基能源材料在绿色能源体系中的进一步应用提供参考。
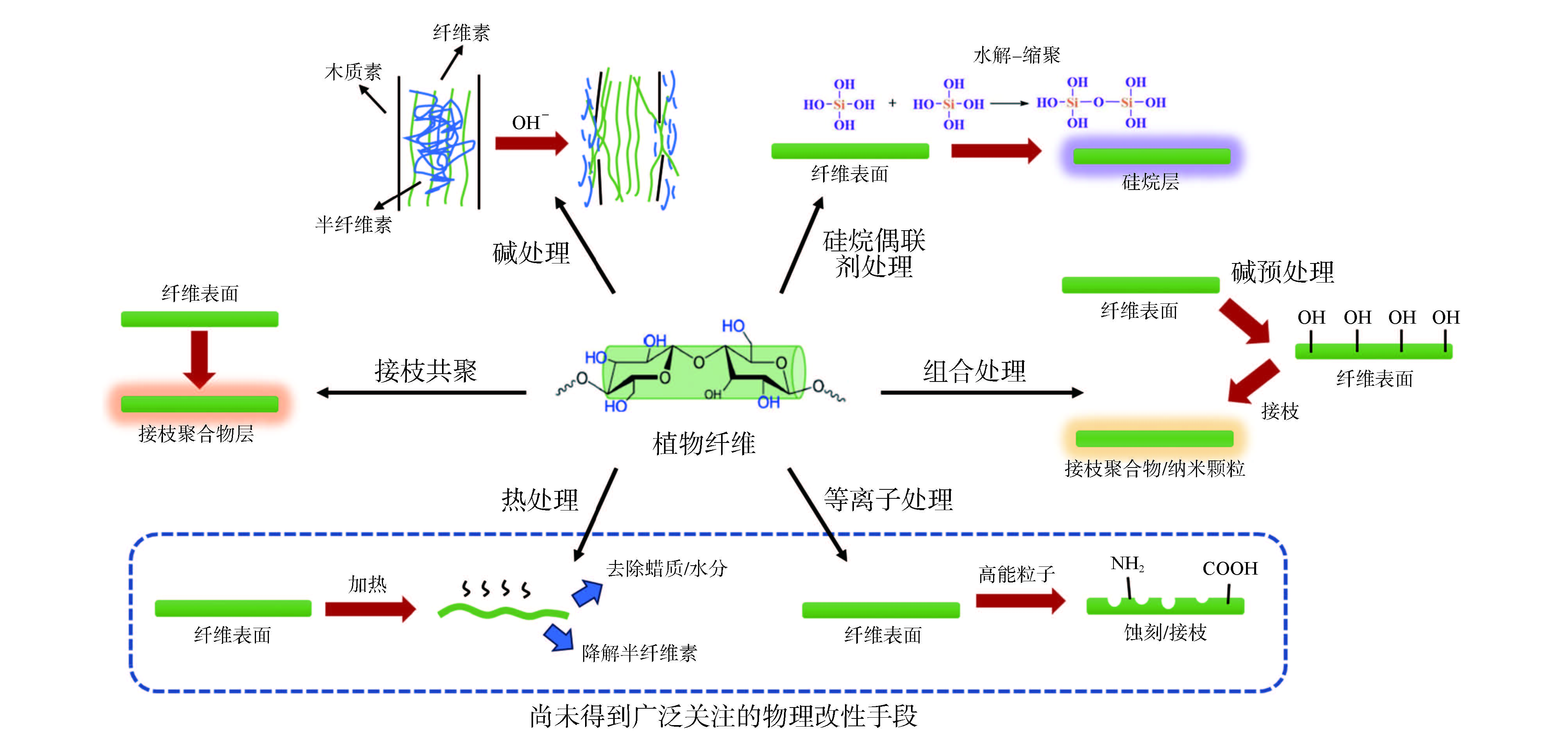
沥青路面受到外部荷载和环境等因素作用,易出现各种病害,进而降低路面使用寿命,危及行车安全。植物纤维具有轻质高强及量大价廉等优势,作为沥青混合料的可再生增强材料能有效提高其力学性能,减少沥青路面的开裂和骨料松动。为此,介绍了植物纤维的分类及物理性能,归纳了纤维的表面处理方法及降低植物纤维亲水性、改善纤维与沥青界面结合的技术途径;总结了植物纤维增强沥青结合料的高低温流变特性、疲劳性能以及沥青混合料的制备工艺与路用性能方面的研究成果。展望了未来可结合智能配比优化、多尺度界面机理研究及工程标准化体系建设,协同推进植物纤维增强沥青基道路材料的高性能化、功能化与绿色可持续发展。
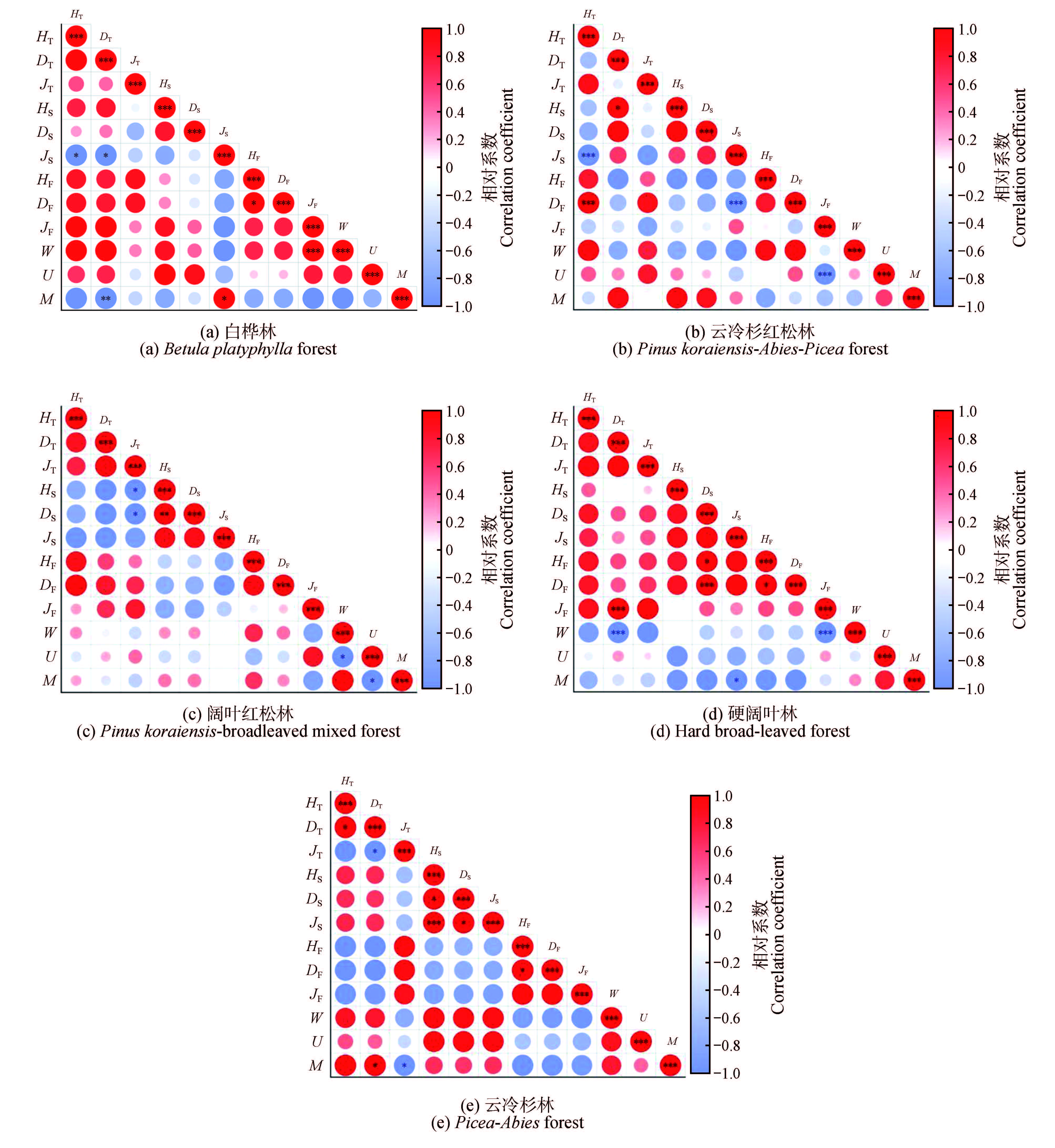
以黑龙江朗乡国家级自然保护区白桦林、云冷杉红松林、阔叶红松林、硬阔叶林和云冷杉林5种林型为研究对象,基于5块固定样地的实测数据,研究5种林分中植物多样性与林分空间结构的关系。以角尺度、大小比数和混交度3个指标来描述林分空间结构,以Simpson优势度指数、Shannon-Wiener多样性指数和Pielou均匀度指数3个指标来描述植物多样性,利用相关性分析探究不同林分空间结构对植物多样性的影响,找出影响植物多样性的主要林分空间结构因子。结果表明,5种林分间角尺度和大小比数无明显差异,云冷杉红松林和硬阔叶林混交度存在显著差异(P<0.05),但5种林分均形成混交、聚集且具有一定竞争力的生长状态。各林分木本植物物种组成丰富,阔叶红松林乔木层Shannon-Wiener指数、Simpson指数和Pielou指数均最高,云冷杉林灌木层Shannon-Wiener指数最高。白桦林乔木层Shannon-Wiener指数和Simpson指数与灌木层Pielou指数呈显著负相关,云冷杉红松林中乔木层Shannon-Wiener指数与草本层Simpson指数呈极显著正相关,阔叶红松林中乔木层Pielou指数与灌木层Shannon-Wiener指数呈显著负相关,硬阔叶林乔木层Simpson指数与草本层Pielou指数呈极显著正相关,云冷杉林灌木层Shannon-Wiener与Pielou指数呈极显著正相关。不同的林分空间结构指标对植物多样性的影响不同,其中最主要的影响因子是混交度,混交度越高,多样性越丰富。研究结果对保护区的生物多样性保护提供指导意见。
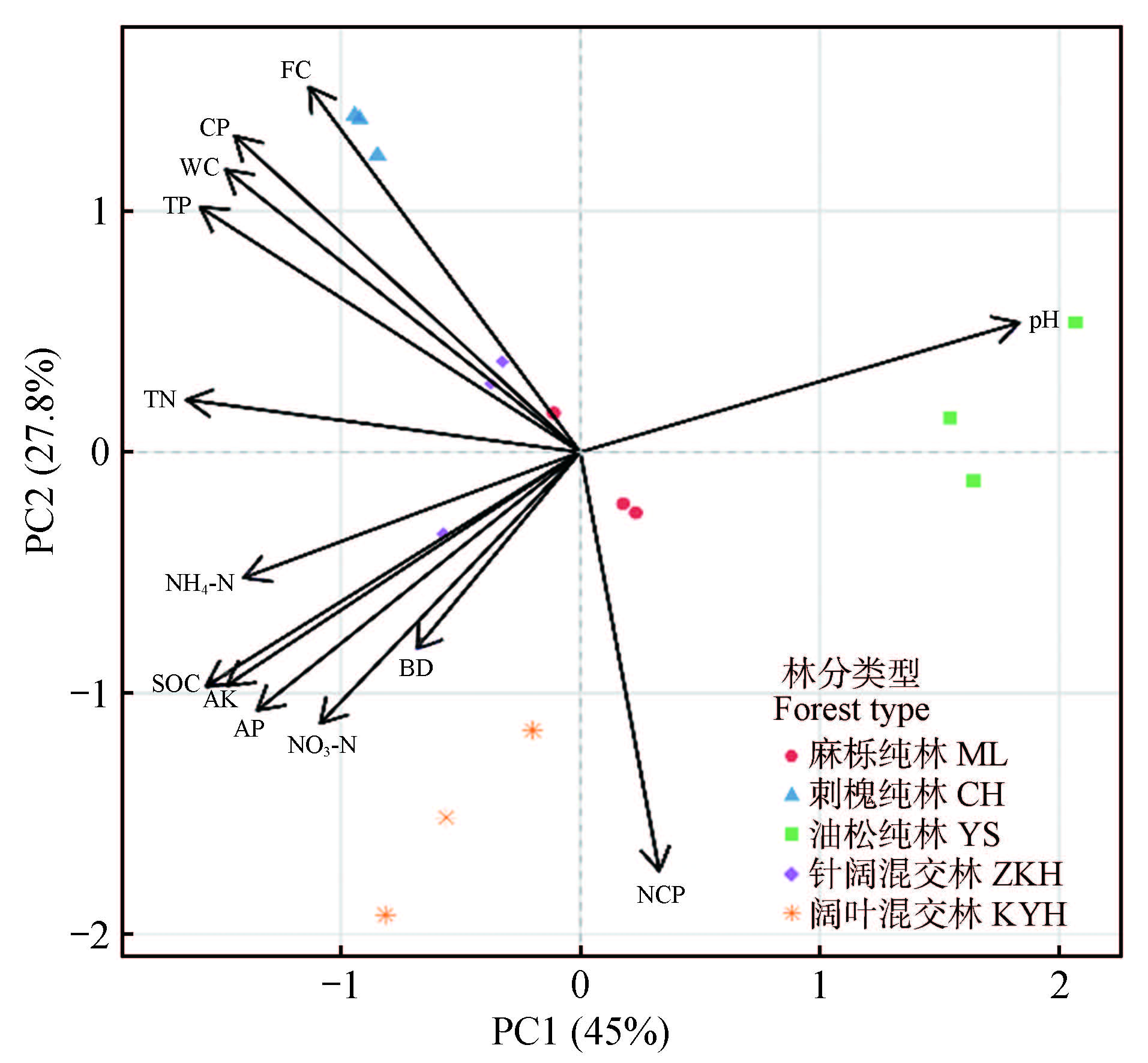
探究黄河下游鲁中南丘陵地区不同人工林林型(纯林与混交林)对土壤水文特性与养分状况的影响,为该区域水土保持林优化配置提供科学依据。选取麻栎纯林、刺槐纯林、油松纯林、阔叶混交林(麻栎×刺槐)和针阔混交林(油松×刺槐)5种典型林型,通过野外采样与室内分析,系统测定土壤容重、孔隙度、持水量、pH、有机碳以及氮、磷、钾等指标。结果表明,刺槐纯林表现出最优的土壤持水能力(田间持水量为52.6%)和较高的孔隙度,但通气性较差;油松纯林透气性与持水能力均弱于其他林型;混交林在土壤透气性和持水能力这2方面表现较为均衡,尤其针阔混交林田间持水量接近刺槐纯林。养分方面,阔叶混交林在有机碳(27.58 g·kg⁻¹)、全氮(4.76 g·kg⁻¹)及速效养分质量分数上显著优于纯林。相较于纯林,混交林(尤其是阔叶混交林)在“持水-通气平衡”和“养分供应”等土壤功能上更具优势,建议在该地区生态修复中优先采用混交造林模式,以实现水土保持与土壤肥力提升的双重目标。
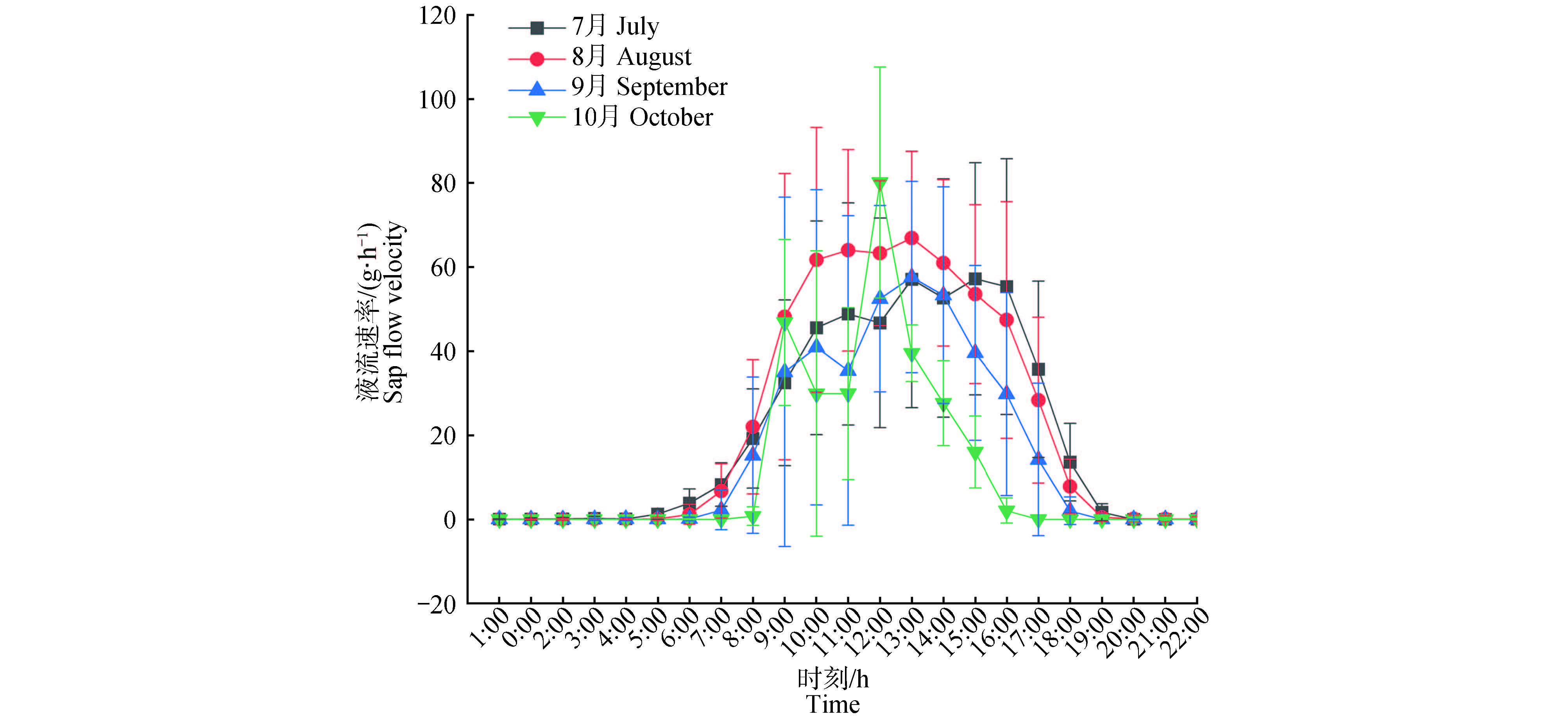
水分是限制科尔沁沙地南缘植物生长与存活的主要限制因子,植物的茎干液流反映树木生理活动状态,是估算单株耗水量的重要基础。开展固沙灌木胡枝子液流速率及对环境因子响应机制研究,为当地胡枝子用水策略及管理提供科学依据和参考。结果表明,观测期间胡枝子液流平均速率为446.38 g/d。胡枝子液流日变化规律呈现双峰“午休”现象,并且午休时间节点随月份的增加(7—10月)提前了1 h。夜间液流平均速率为0.045 g/h,对日总液流贡献仅为0.077%。胡枝子茎干液流速率与太阳总辐射、气温、风速、土壤温度、水汽压亏缺呈正相关关系,与空气相对湿度、降雨量呈负相关关系。以上环境因子中水汽压亏缺对胡枝子液流影响最大贡献率高达89.78%,并且二者关系存在明显的阈值效应,水汽压亏缺-液流速率关系曲线拐点为0.719 kPa,液流速率阈值上限为111.85 g/h。通过分析沙地胡枝子蒸腾耗水变化特征及其对环境因子响应机制,有助于理解气候变化下沙地胡枝子生态水文过程,可为研究区林分结构优化、林分资源管理提供科学的理论依据。
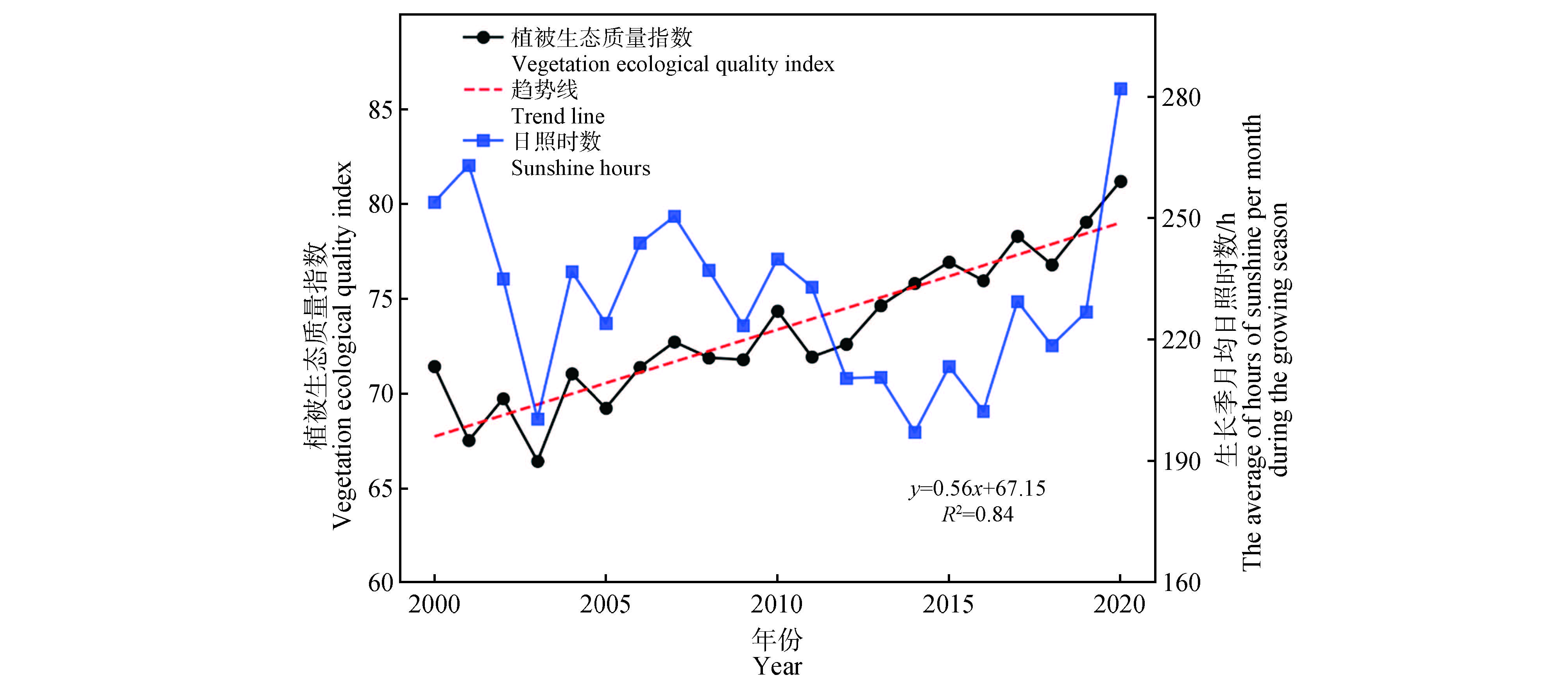
植被生态质量是表征陆地植被景观的一个基本要素,其变化对全球和区域生态系统的能量流动和物质循环具有深刻的影响。为此,以黑龙江省为研究区域,基于Landsat系列数据、气象数据和土地利用类型数据分别估算植被覆盖度(fractional vegetation cover,FVC)和净初级生产力(net primary productivity,NPP),从而构建植被生态质量指数(vegetation ecological quality index,VEQI),分析2000—2020年植被生态质量指数的时间变化特征,运用最优参数地理探测器探究地形因子、土壤因子、气象因子和人为活动因子对植被生态质量指数空间分异的驱动机制。结果表明,2000—2020年,黑龙江省年均植被生态质量指数呈显著上升趋势(年均增长0.56);4个因子均能够有效解释植被生态质量指数的空间分异。其中,土壤容重、生长季月均温度、土壤酸碱度和高程是黑龙江省植被生态质量指数空间分异的主要影响因子,人口密度和坡向的协同作用对植被生态质量指数的空间分异有着强烈的非线性影响。
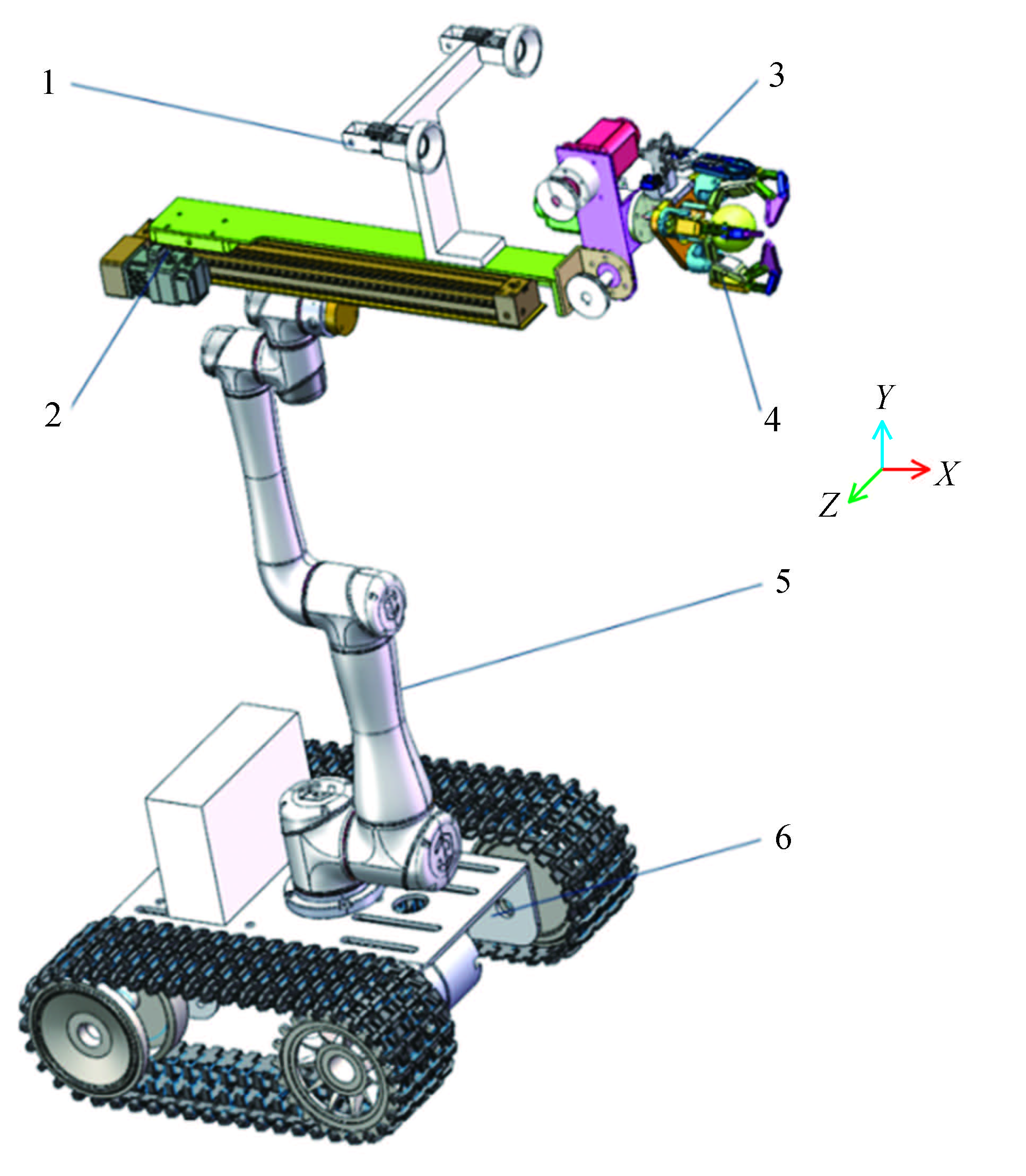
在德化梨种植中,人工采摘效率低下,且亩均人工成本占比超15%;传统机械采摘因装备刚性强,果实破损率常超20%,难以适配其果皮薄(0.2~0.3 mm)、果肉脆的特性。针对这一产业痛点,设计一款“仿生末端执行器+YOLOv11视觉定位”一体化采摘机器人系统。该系统核心包括六自由度机械臂、双目深度相机及电驱分离式末端执行器,执行器采用三指柔性夹持与剪切机构,兼顾无损抓取与果柄精准切断;视觉系统以YOLOv11为基础,引入全新的融合位置敏感空间注意力机制(C2PSA)模块强化果实与叶片特征区分,结合双目相机完成三维定位。基于福建德化梨(pear)园实测样本的试验表明,“pear”类别在置信度≥0.7时召回率保持0.85以上,F1最优值0.83(置信度为0.565),mAP50稳定于0.87。该方案可为德化梨自动化采摘提供技术支持,其设计思路对桃子、草莓等脆弱果实采摘装备研发具有参考价值。
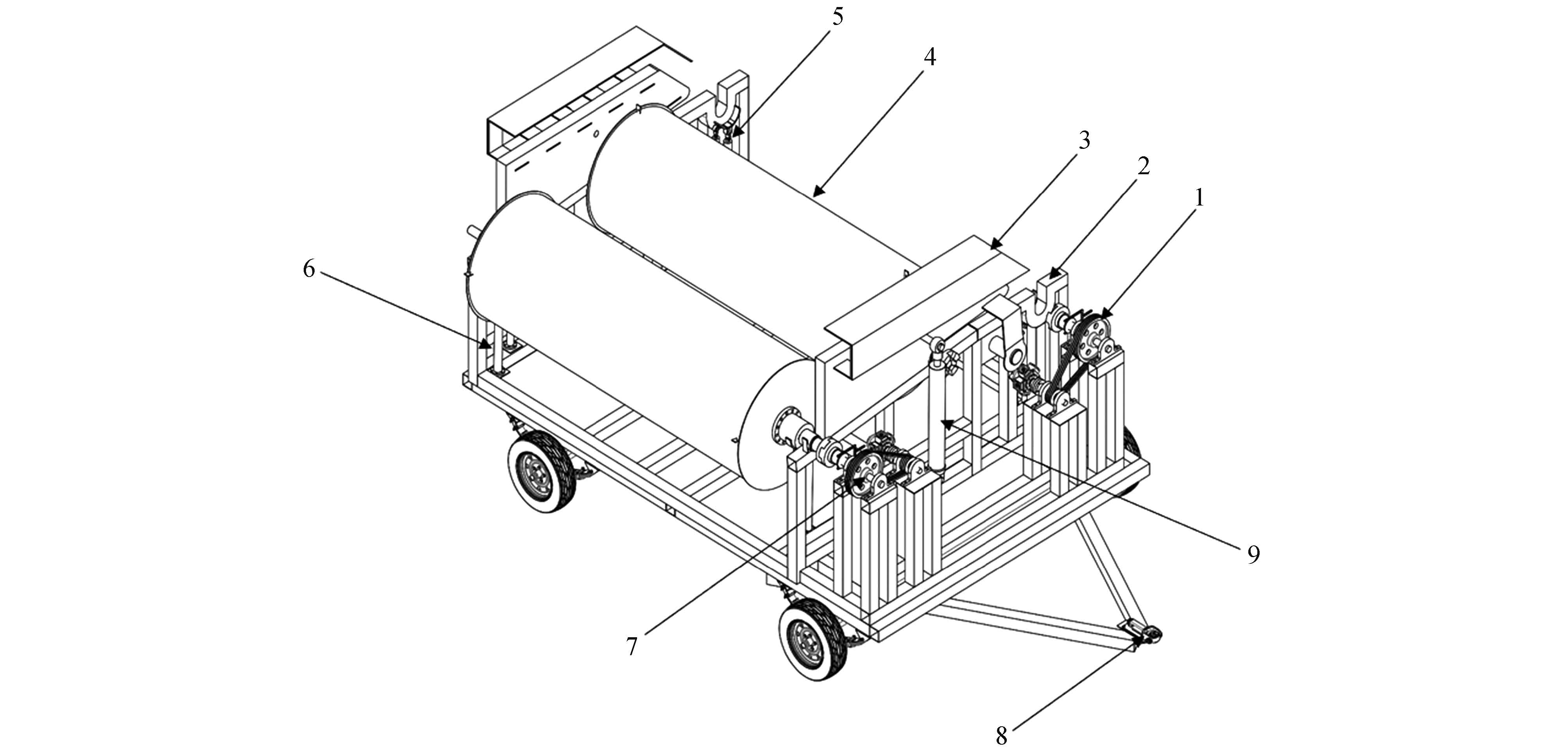
针对传统核桃收获机振动机构激振力固定、难以适应不同径级果树导致的采收效率低和树体损伤风险高的问题,设计一款激振力可控的振动机构。该机构采用双电机独立驱动2组扇形偏心块组合,生成3挡可调的理论激振力,通过深度相机实时检测树干直径实现激振力与树干径级的动态匹配;在SolidWorks建立振动机构的三维模型,通过参数化计算设计偏心块,并利用有限元分析和机械系统动力学自动分析软件(automatic dynamic analysis of mechanical systems,ADAMS)验证机构性能;树干直径通过深度相机点云数据结合基于随机采样一致性(random sample consensus,RANSAC)的最小二乘圆柱拟合算法识别。结果表明,ADAMS软件仿真得到3档实际激振力为12.40、18.82、31.22 kN,与理论值相对误差不高于0.80%;ANSYS(analysis system)软件对偏心块进行分析,模态频率范围为755.36~3 983.60 Hz,有效避开了工作频率16 Hz;树干直径识别算法经田间验证相对误差切尾均值为1.63%;田间模拟系统实现了“径级-激振力-振幅”闭环控制。该振动机构能够精确产生3档目标激振力,结构可靠,并可通过树干直径输入实现激振力自适应调节,为林果采收装备智能化升级提供了新思路。
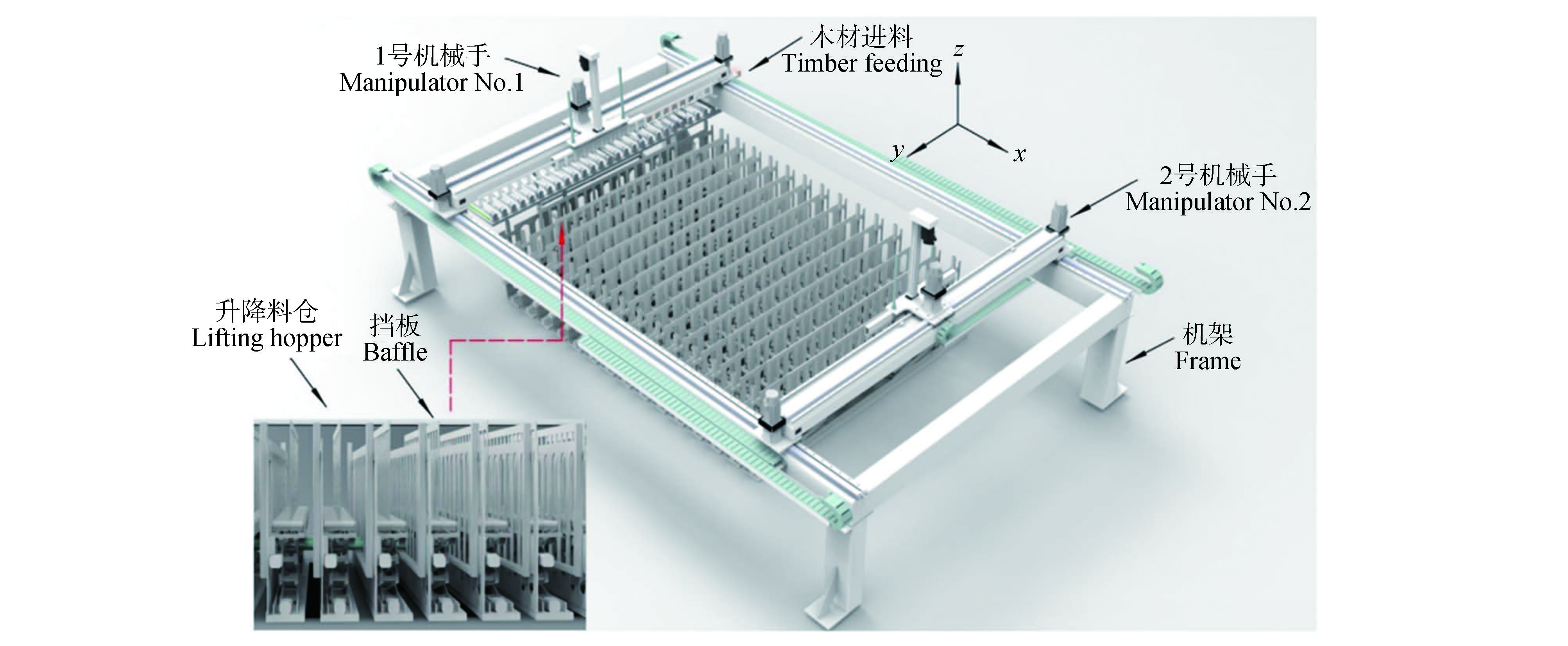
为提高定制化门窗材分类堆垛效率,对双梁堆垛机的机构轨迹运动特征进行设计与分析。针对双梁堆垛机在堆垛过程中产生的运动轨迹动态干涉问题,提出以相对位置最优可行度进行判别分析的方法,在此基础上对不同的运动特性制定不同的运动策略,构建双梁堆垛机的协同规划模型,通过标准化运动学建模剖析轨迹运动特性,完成可行度规划模型优化联合机械系统动力学自动分析软件(Automatic dynamic analysis of mechanical systems,ADAMS)与Matlab Simulink建立运动学模型,对机械手的规划模型进行仿真验证。以ADAMS与Matlab Simulink的系统仿真技术对运动模型的解集进行数值分析验证显示,双机械手x轴方向位移轨迹无重叠区域,有效避免干涉碰撞风险;速度曲线连续无突变,加速度集中在2~4 m/s²,证实所建立运动模型的有效性。研究建立的双机械手运动规划模型可以有效地提升门窗材分类堆垛过程的效率,具有很高的可靠性,对于促进定制化门窗材的智能化分类堆垛具有重要意义。
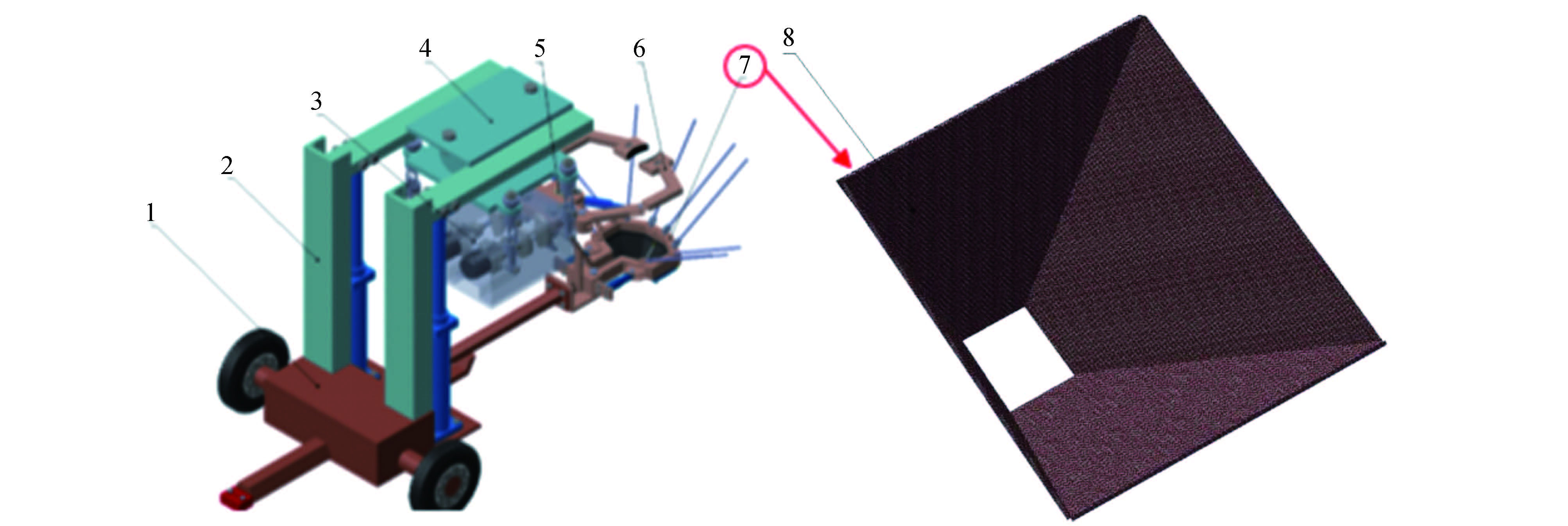
针对矿山生态修复面临的地形复杂、土壤贫瘠、效率低下及专用装备缺乏等问题,需要开发一种高效、低成本、适于机械化作业的矿山植被恢复的新方法,以克服传统技术的局限性。为此,提出一种创新型矿区植被恢复策略,该策略的装置由育种绳和铺设装置2个模块组成,育种绳可以预先在工厂进行标准化生产,然后通过铺设装置将育种绳铺设在植被修补处。通过植树效率和经济效益评估其植树恢复效果。研究表明,新方法种植效率达200~260 m²/h,综合成本约为50元/m²。在治理矿区时,新方法耗时比挂网喷播等技术耗时少,陡坡大的工况下优势更显著。动力学仿真验证,驱动轴工作扭矩小于12.2 kN·m,满足强度设计要求,液压系统最大载荷小于25 kN且留有充足裕度,表明装备核心部件的可靠性。该育种绳技术与配套装备,为矿山生态修复提供可量化、可推广的高效解决方案,该方案显著提升了植树效率及经济效益,对推动矿山绿化从人工模式向机械化、规模化转型具有重要意义。
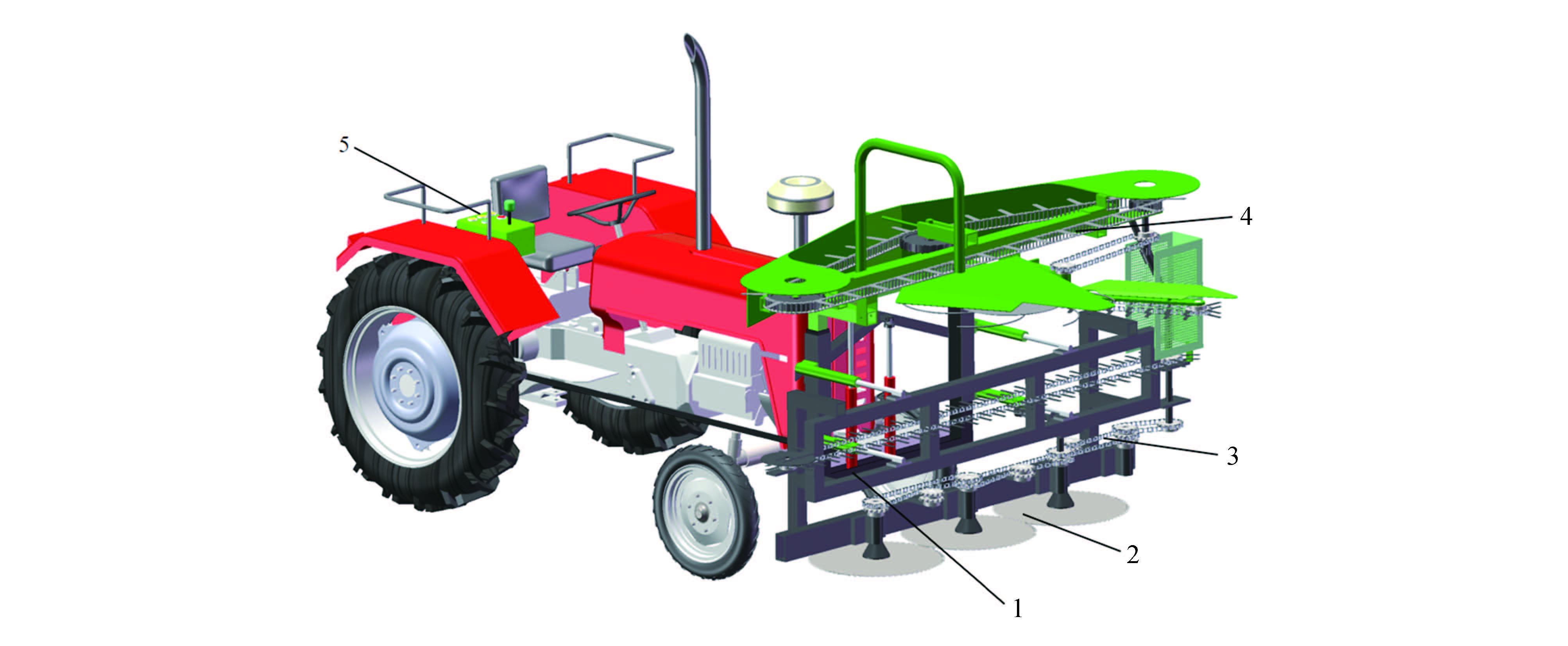
为解决刺五加割灌设备对地形适应力差、割灌效率低的问题,设计一款前置搭载于拖拉机上的林间圆锯式刺五加割灌机,通过结构设计明确整机由支撑调节、传动、割灌及拨料4大核心机构组成,对其支撑调节机构、拨料机构进行设计,并分析割灌机构圆锯片的运动轨迹和锯切力,验证其功率符合要求。以圆锯转速、行进速度和切割高度为影响因素进行田间试验,用数据处理软件处理试验数据。结果表明,行进速度对割灌机割净率影响最大,其次是圆锯转速,切割高度影响最小。结合Design-Expert 13软件构建割净率回归模型并优化参数,得到各因素对割净率的影响程度由大到小为行进速度、圆锯转速、切割高度,当圆锯转速为1 925 r/min、行进速度为4.2 km/h、切割高度为39.6 cm时,割净率达99.4%,作业效果最优。该设备可满足林地复杂地形下刺五加高效割灌需求,为刺五加规模化种植的机械化修剪提供技术支撑。
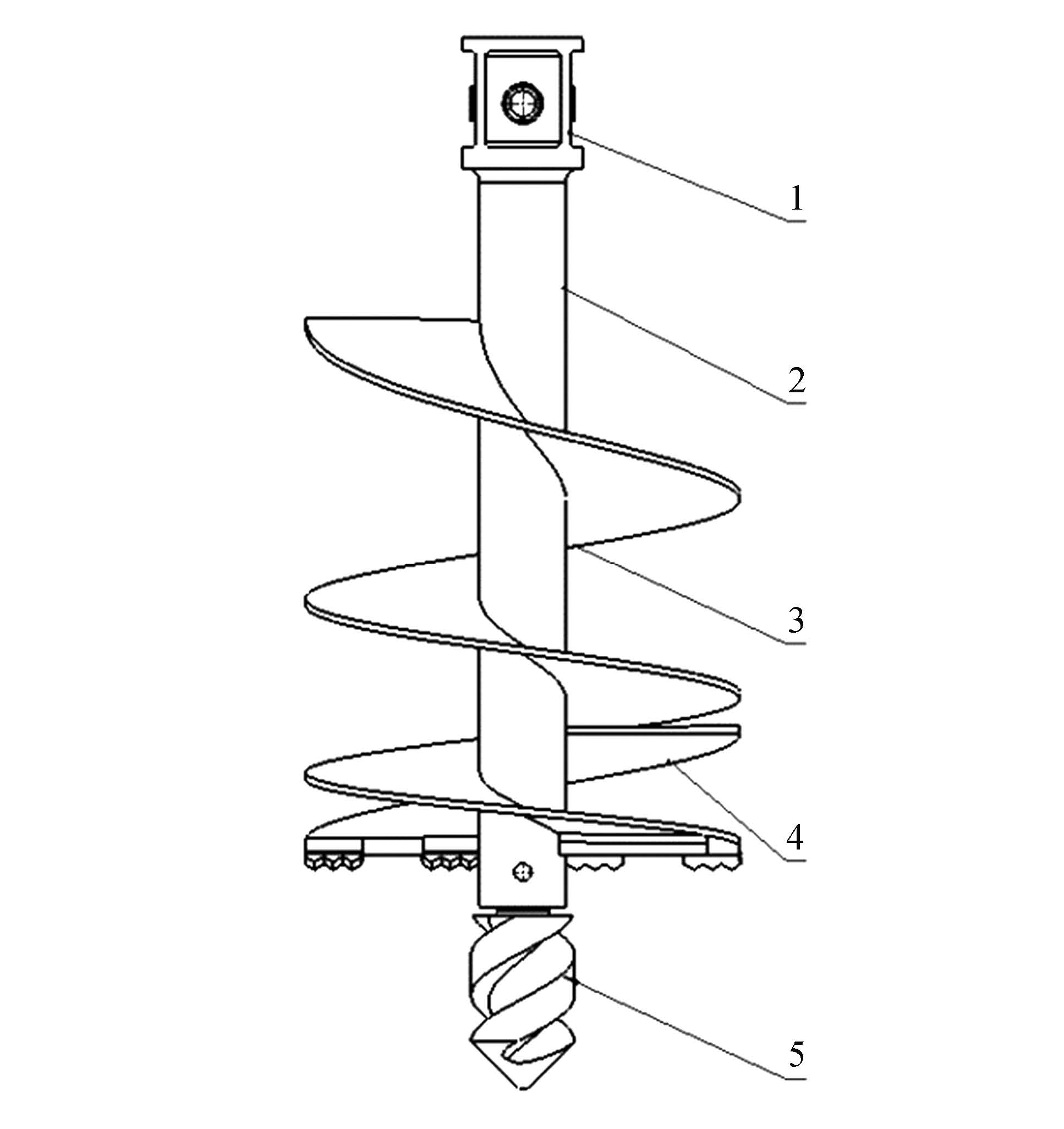
针对油茶挖坑机具工作过程中出土率低下、土壤回流量大、人工二次清土工作繁杂等问题,依照现有油茶挖坑机具的结构,利用离散元法仿真软件(Engineering discrete element method,EDEM)仿真及试验研究,优化机具参数提高挖坑出土率。以适用于丘陵山地复杂立地环境的大直径挖坑钻头为研究对象,提出油茶大直径钻孔技术方案,设计一款大直径钻孔、高出土率的钻头。对挖坑钻头主要部件建模并结合EDEM2023软件对土壤建模,同时对机具挖坑工作过程进行仿真。以钻孔装置出土率高低为评价指标,以钻杆直径、螺旋升角、土壤与翼片静摩擦因数为试验因素,进行单因素试验确定3个参数的取值范围;以此为基础进行多因素正交试验从而确定出土率最佳的参数组合。单因素试验结果表明,钻孔装置钻杆直径从80 mm增大至120 mm,出土率呈现下降趋势;翼片螺旋升角由15 增大至23 ,出土率呈现下降趋势;土壤与翼片的静摩擦系数由0.50增大至0.60,出土率呈现先增后减趋势。在三者中,螺旋升角对出土率影响最大,钻杆直径对出土率影响最小。二次回归正交旋转组合试验结果表明,三因素对挖坑机具出土率的影响由大到小的顺序为螺旋升角、静摩擦系数、钻杆直径,最佳方案是钻杆直径为82 mm、螺旋升角为23 、静摩擦因数为0.56,这3个参数组合下出土率为92.73%。
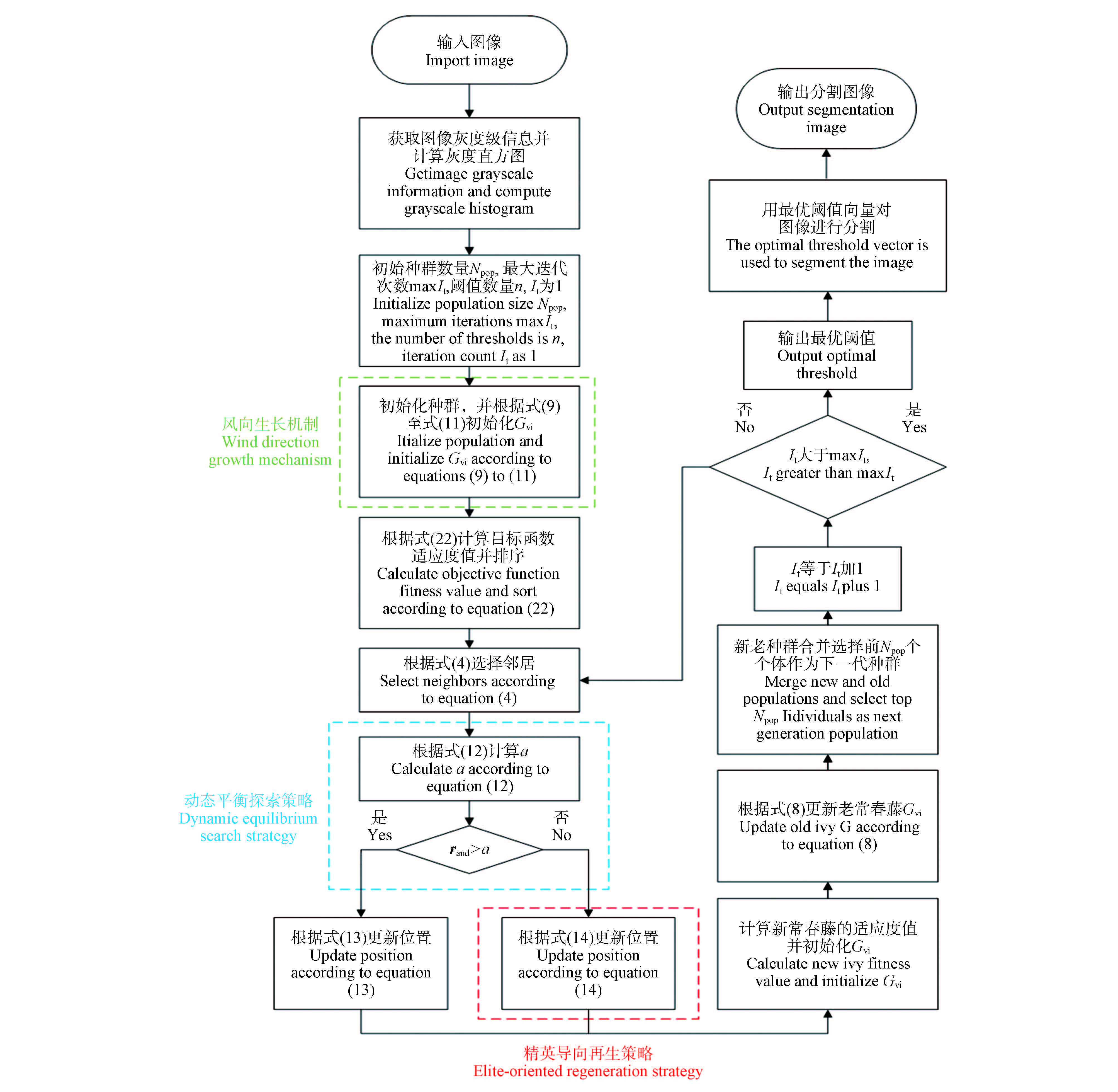
针对木材加工自动化生产中因表面缺陷边缘模糊及纹理干扰导致的图像分割精度不足问题,提出一种改进的常春藤优化算法(improved ivy algorithm,IIVY)用于木材缺陷图像的多阈值分割。首先,通过风向生长机制增强种群多样性,并设计非线性动态平衡因子以动态协调全局勘探与局部开发能力;其次,引入精英导向再生策略提升算法跳出局部最优的能力;然后,基于对称交叉熵设计适应度函数,利用IIVY对木材缺陷图像进行分割,并与4种经典算法(灰狼优化算法(grey wolf optimizer,GWO)、鲸鱼优化算法(whale optimization algorithm,WOA)、麻雀搜索算法(sparrow search algorithm,SSA)、沙猫群优化算法(sand cat swarm optimization,SCSO))对比分析,评价指标包括最优适应度值、峰值信噪比、特征相似度和主观视觉评价。结果表明,IIVY适应度收敛曲线明显优于对比算法;在峰值信噪比和特征相似度指标上,IIVY取得最优值的试验组数分别占总试验组数的83.33%和91.67%;IIVY在缺陷区域边缘的分割中更加准确,分割结果完整保留木材纹理细节。IIVY算法能够准确分割木材表面缺陷,保留木材表面的纹理特征,为木材缺陷检测提供可靠技术支撑。
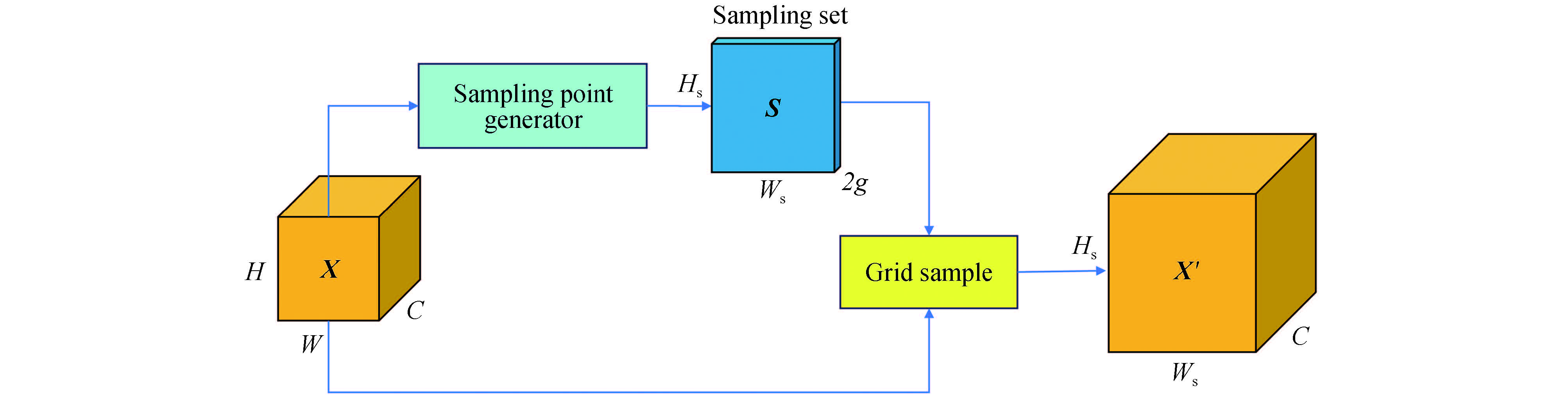
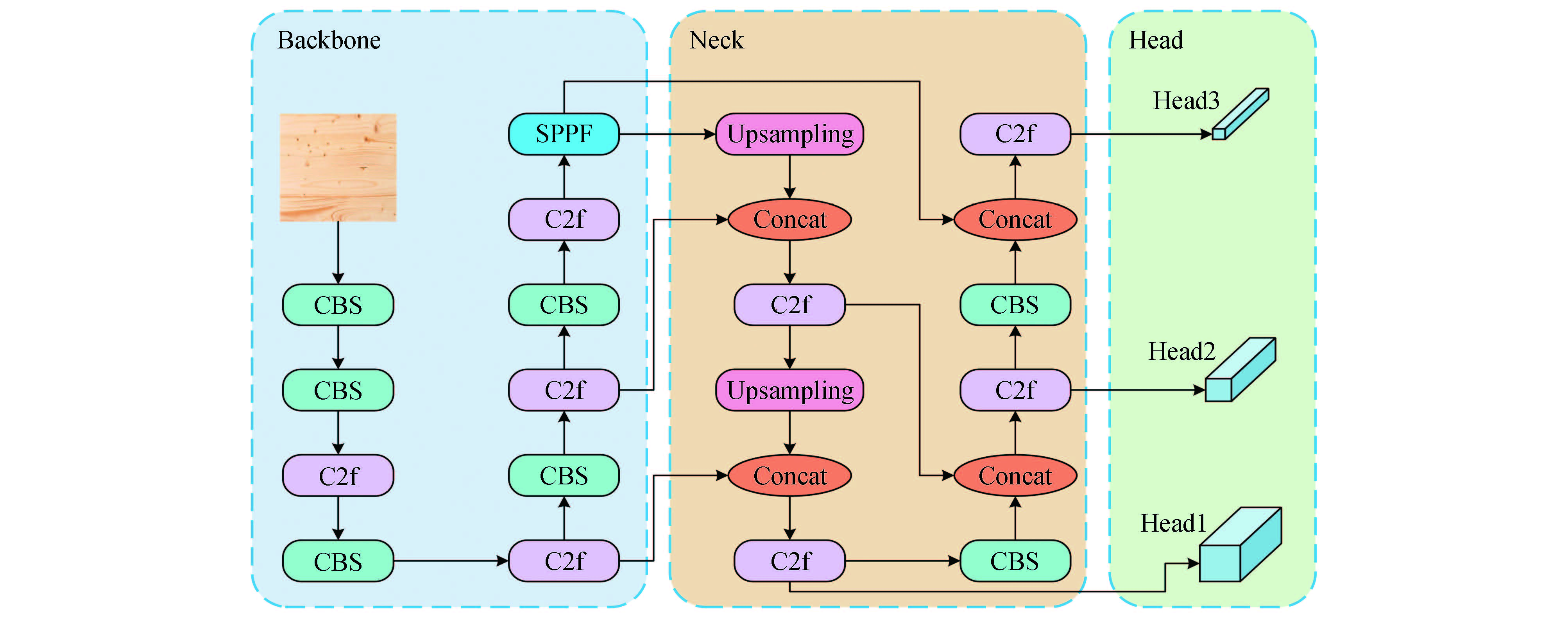
针对木材表面缺陷检测中存在的多尺度缺陷、复杂背景干扰及小目标漏检等问题,基于YOLOV11n提出一种多尺度特征聚合的木材缺陷检测算法PADDL-YOLO(PADDL是由PMSFA(partial multi-scale feature aggregation)、ADown(average pooling down sampling)、DySample(dynamic upsampler)、DPB(dynamic position bias)与LSDECD(lightweight shared detail-enhanced convolutional detection)首字母拼写)。首先,通过设计部分多尺度特征聚合(partial multi-scale feature aggregation,PMSFA)模块增强多尺度缺陷特征提取能力;其次,采用平均池化下采样(average pooling down sampling,ADown)与动态上采样器(dynamic upsampler,DySample),减少信息丢失,同时降低计算复杂度,提升模型对小目标的检测能力;然后,在注意力机制中引入动态位置偏置(dynamic position bias,DPB)模块改进C2PSA模块,强化空间位置感知能力,有效提升缺陷定位精度。此外,设计轻量级细节增强检测头(lightweight shared detail-enhanced convolutional detection,LSDECD),通过细节增强卷积强化边缘特征的捕获能力。试验表明,PADDL-YOLO在木材缺陷检测任务中表现出色,其精确度为91.5%,召回率为91.4%,mAP@0.5为95.0%,较基准模型YOLOV11n分别提高5.2%、4.9%和3.8%。同时,模型参数量减少25.6%,计算效率显著提升,为高精度实时检测提供有效解决方案。
为解决现有木材缺陷检测方法在复杂纹理场景下精度较低的问题,提出一种基于改进YOLOv8s的木材缺陷检测方法。首先,在模型的主干网络中引入高效多尺度注意力机制(efficient multi-scale attention,EMA),加强模型对复杂纹理缺陷的上下文感知能力。其次,将颈部网络设计为重参数化泛化特征金字塔网络,增强模型跨尺度特征融合效率。然后,将损失函数替换成SIoU,提高检测框回归精度。最后,将倒置残差模块iRMB与C2f模块进行融合,增强模型对微小缺陷捕捉能力。试验结果显示,所提改进方法相较于基准模型,在精准率、召回率、检测精度、检测精度均值方面分别提高5.09%、3.13%、3.72%、2.63%,检测速度也达到了120帧/s。研究表明,所提改进方法显著增强了模型的鲁棒性和泛化能力,使得模型性能更加卓越、稳健。
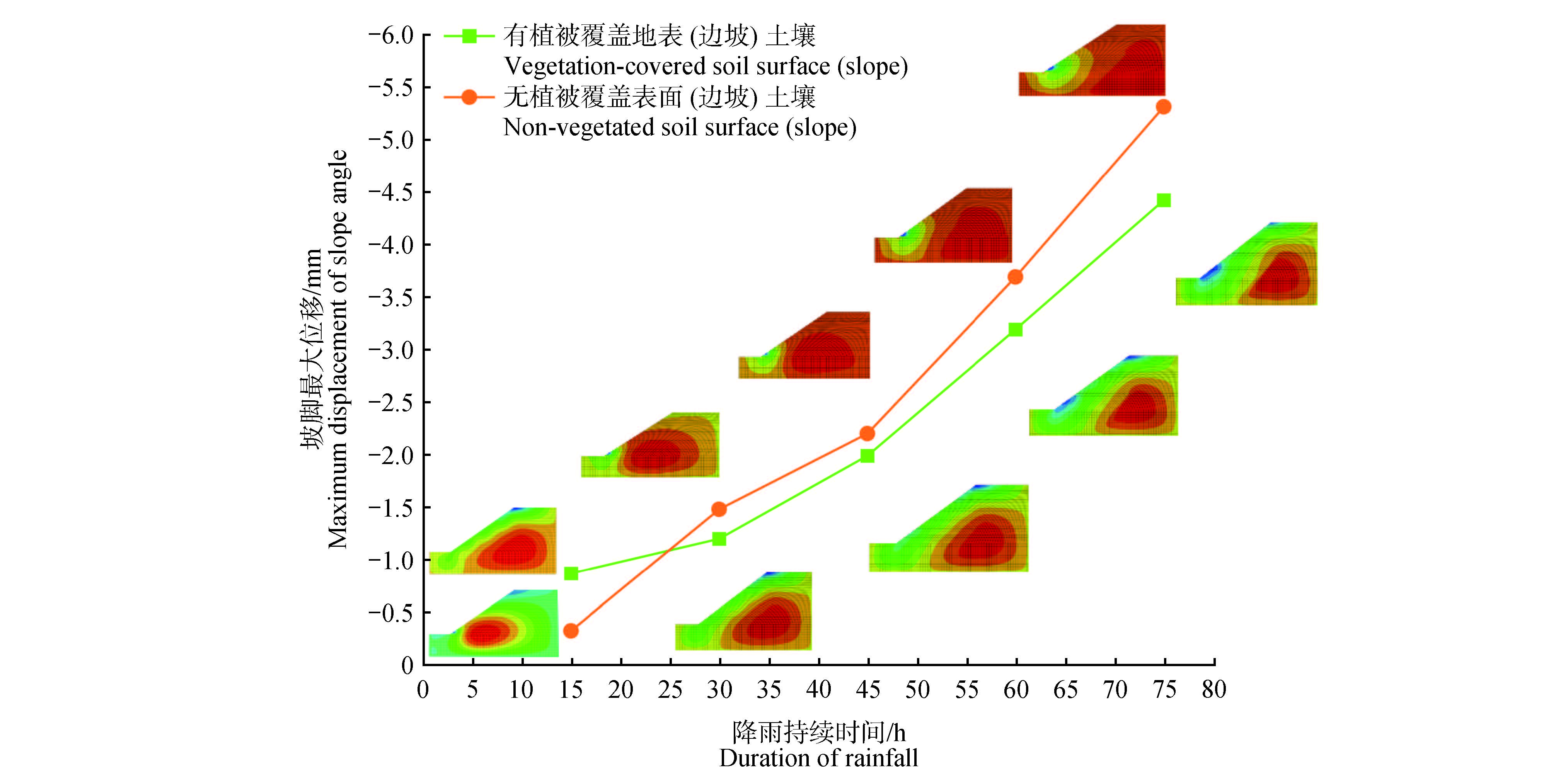
通过数值模拟与宏观试验相结合的方法,探讨植被对边坡冲刷防护的作用机制。首先通过搭建人工试验台,对是否有植被覆盖条件下的边坡进行实际试验,然后利用数值模拟对不同植被条件下的边坡冲刷过程进行仿真。试验结果表明,植被能够有效防护边坡,减缓冲刷速率,且防护效果具有较强的适应性,仿真结果与试验结果的变化规律与趋势具有一致性,验证其数值模拟结果的可靠性。进一步研究表明,不同冲刷时长下植被对边坡稳定性具有重要影响。通过数值模拟以及试验的分析,验证植被通过叶、茎、根的协同作用改善边坡稳定性。植被在边坡冲刷防护中发挥重要作用。
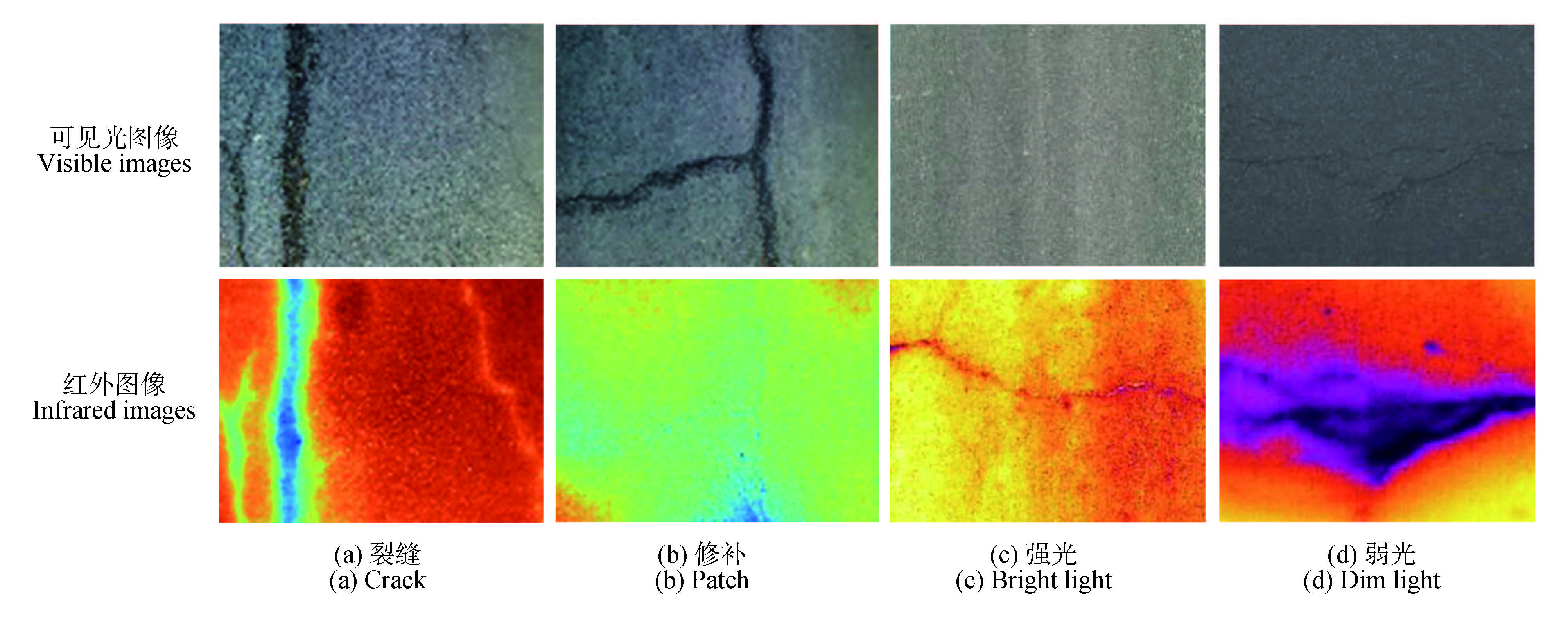
林区道路因其所处的自然环境特点和车载荷载易产生裂缝、坑槽等病害,路况较差且养护成本高。针对病害识别过程中目标检测框不准确、无人机视角下病害尺度变化大以及光照条件不足等问题,提出基于可见光与红外图像中间融合策略的双模态沥青路面病害检测方法(bimodal integrated road detection YOLOv8,BIRD-YOLOv8)。将自适应细粒度通道注意力机制(adaptive fine‑grained channel,FCAttention)和线性可变形卷积(linear deformable convolution,LDConv)串联提出DSFM(DynaSpectra fusion module)模块,替换BIRD-YOLOv8主干网络中的C2f结构,提升病害区域的特征提取能力;引入边界框回归优化方法(normalized Wasserstein distance loss,NWDLoss)替换CIoU,以增强模型对小尺度病害的检测能力。试验结果表明,改进后算法的均值平均精度达到83.3%。其中,横向裂缝、纵向裂缝、网状裂缝和坑槽的平均精度分别达到88%、91.3%、90.5%、63.5%,为林区道路路面病害识别与养护提供重要依据。