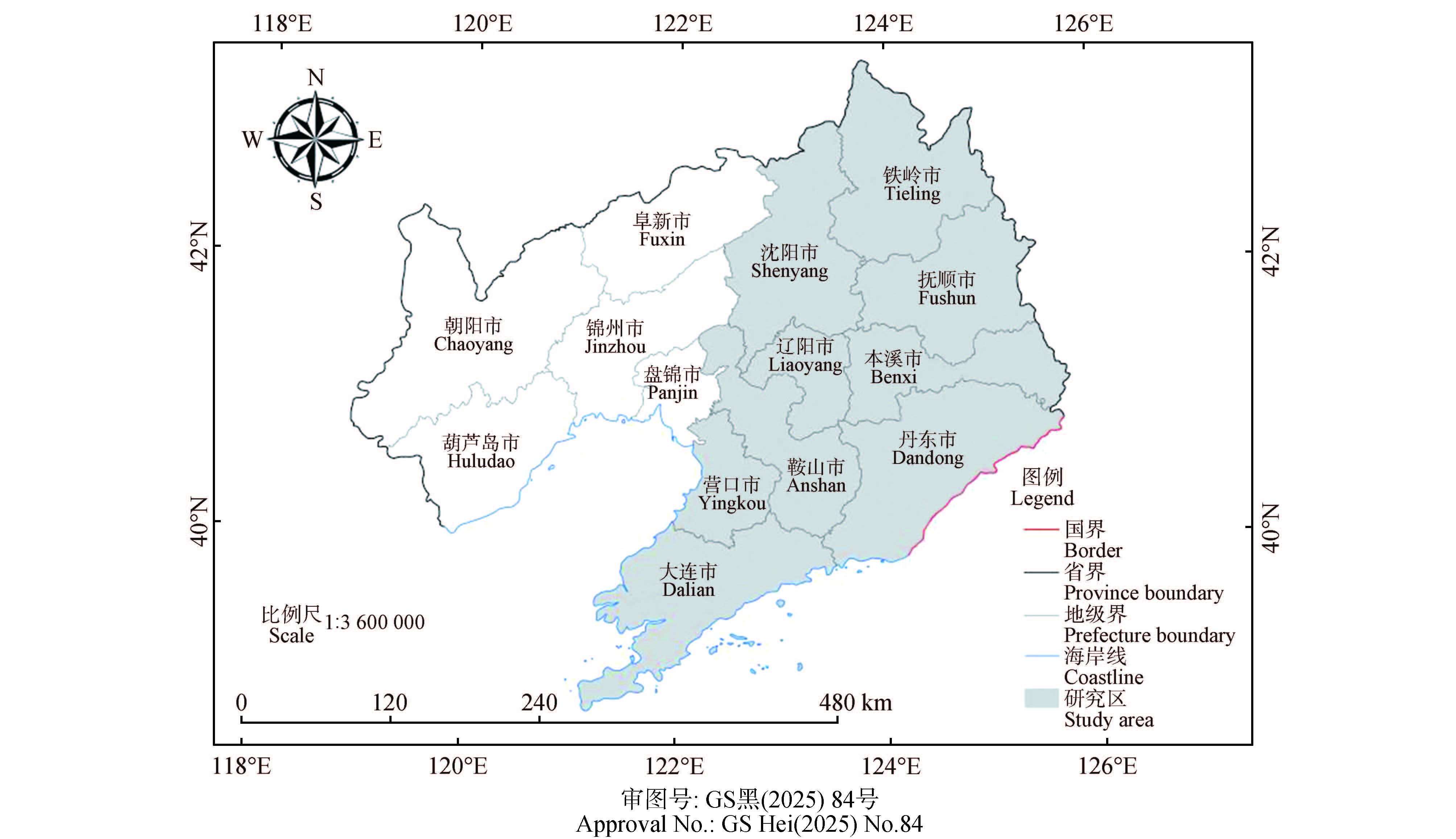
This study aims to explore the spatial distribution characteristics of pine wilt disease in nine cities of eastern Liaoning Province (including Shenyang, Dalian, Anshan, Fushun, Benxi, Dandong, Yingkou, Liaoyang, and Tieling), construct a prediction model for pine wilt disease risk areas using the geographically weighted Logistic regression (GWLR) model, and provide a scientific basis for the prevention and control of pine wilt disease. Based on the compartments data with pine wilt disease information of Liaoning Province in 2023, kernel density analysis was used to characterize the spatial distribution of pine wilt disease, and thirty-two variables, including meteorological, topographic, vegetation index, and social factors, were considered. Key factors for the prediction model were screened using Spearman's correlation test, bidirectional stepwise regression, and variance inflation factor (VIF) analysis. Logistic regression and GWLR models were constructed to predict pine wilt disease, their prediction accuracies were compared and the spatial distribution of GWLR coefficients for different independent variables were analyzed. Pine wilt disease outbreaks in Liaoning Province were primarily concentrated around Fushun City. Five influential factors were key factors in the prediction model of pine wilt disease in nine cities of eastern Liaoning Province, including the distance from compartments to roads, distance from compartments to railways, annual average temperature, growing-season drought index, and soil moisture. The GWLR model significantly outperformed the traditional Logistic regression model, with an R² improvement of 0.42, a reduction of 0.14 in root mean square error (RMSE) and 0.10 in mean absolute error (MAE). The risk prediction showed high accuracy using GWLR: overall accuracy (OA) of 90.41%, producer's accuracy (PA) of 95.34% and user's accuracy (UA) of 86.79% for risk areas, and PA of 85.49% and UA of 94.83% for non-risk areas. The high-risk zones were concentrated in Fushun City, southeastern Tieling City, and northwestern Benxi City. Pine wilt disease in eastern Liaoning's nine cities was predominantly distributed around Fushun. The GWLR model effectively captured the spatial heterogeneity of the disease, with significant spatial variations in the coefficients of independent variables. The distances from compartments to roads and railways exhibited obvious spatial heterogeneity in affecting disease incidence, while annual average temperature promoted disease incidence in most areas. This study provides theoretical support for exploring the transmission patterns of pine wilt disease and formulating precise prevention strategies.
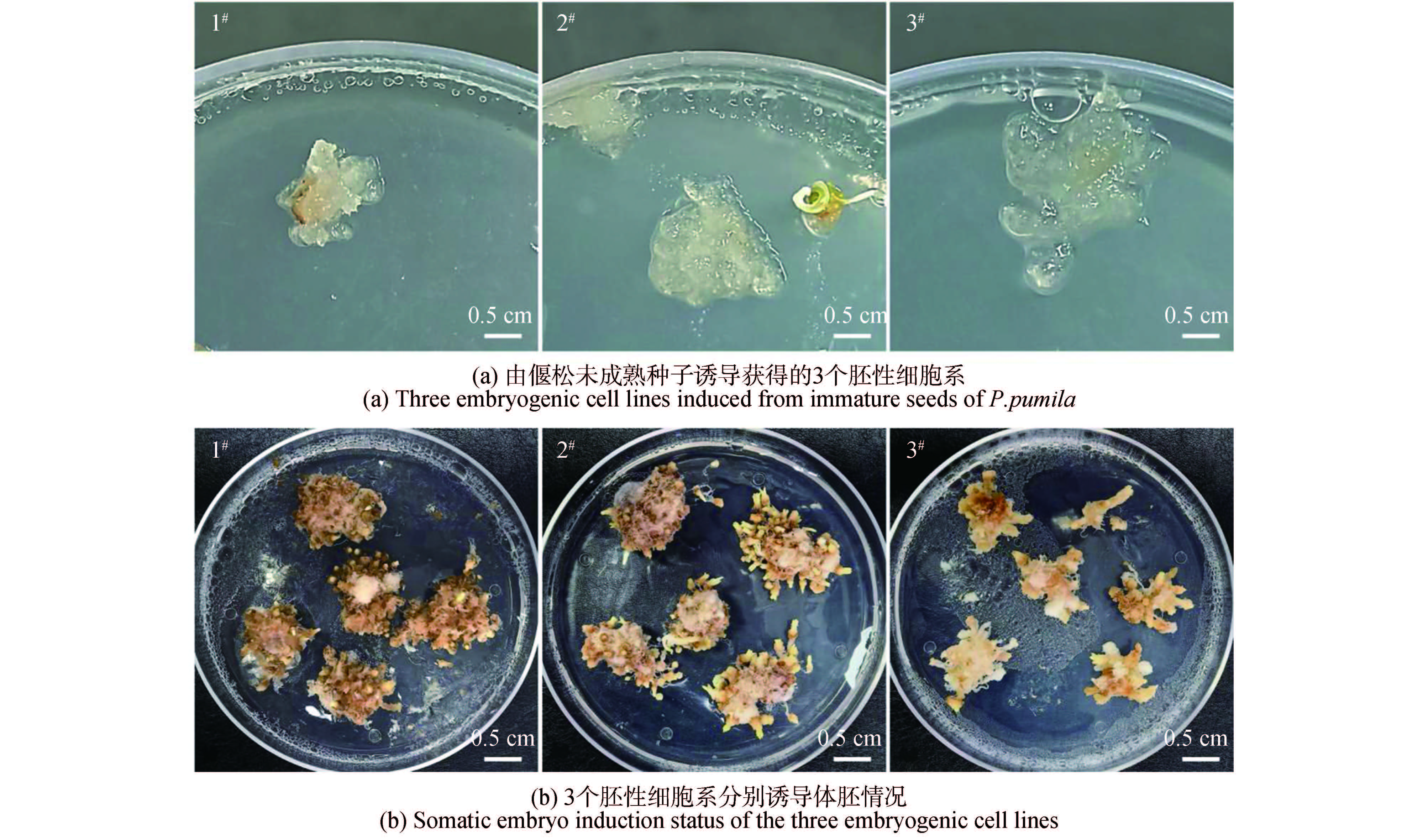
Immature zygotic embryos from immature seeds of Pinus pumila were used as explants, with DCR as the basal medium. Somatic embryogenesis was induced by adjusting the concentrations of plant growth regulators (6-BA, NAA, and ABA), leading to the acquisition of 3 embryogenic cell lines. Based on this somatic embryogenesis system, an Agrobacterium-mediated genetic transformation system suitable for P. pumila was finally established through the determination of kanamycin selection concentration, infection time, and co-cultivation duration, and resistant calli of P. pumila were successfully obtained using this system. The results indicated that the somatic embryogenesis system of P. pumila included 6 stages: disinfection of immature seeds, induction of embryogenic callus, proliferation of embryogenic callus, induction of somatic embryos, post-germination culture, and rooting culture. The optimal medium for embryogenic callus induction was DCR+1 mg/L 6-BA+2 mg/L NAA, with an induction rate of 1.11%; the optimal medium for embryogenic callus proliferation was DCR+0.35 mg/L 6-BA+0.5 mg/L NAA, achieving a proliferation multiple of 3.73; the optimal medium for somatic embryo induction was DCR+20 mg/L ABA, with an average of 86.67 somatic embryos per gram of embryogenic callus; after somatic enbryos post-germination, DCR+activated carbon was used for root induction, resulting in a rooting rate of 58%; and the optimal medium for rooting culture was WPM+0.1 mg/L IBA. For genetic transformation, the optimal conditions were a kanamycin concentration of 60 mg/L, an infection time of 15 minutes, and an Agrobacterium suspension concentration of OD₆₀₀ is 0.4; after 7 days of recovery culture, the tissues were transferred to a medium containing 60 mg/L kanamycin for selection and callus proliferation induction. Through verification by DNA-level identification and GUS histochemical staining, transgenic calli were successfully obtained, and a genetic transformation system for P. pumila was initially established.
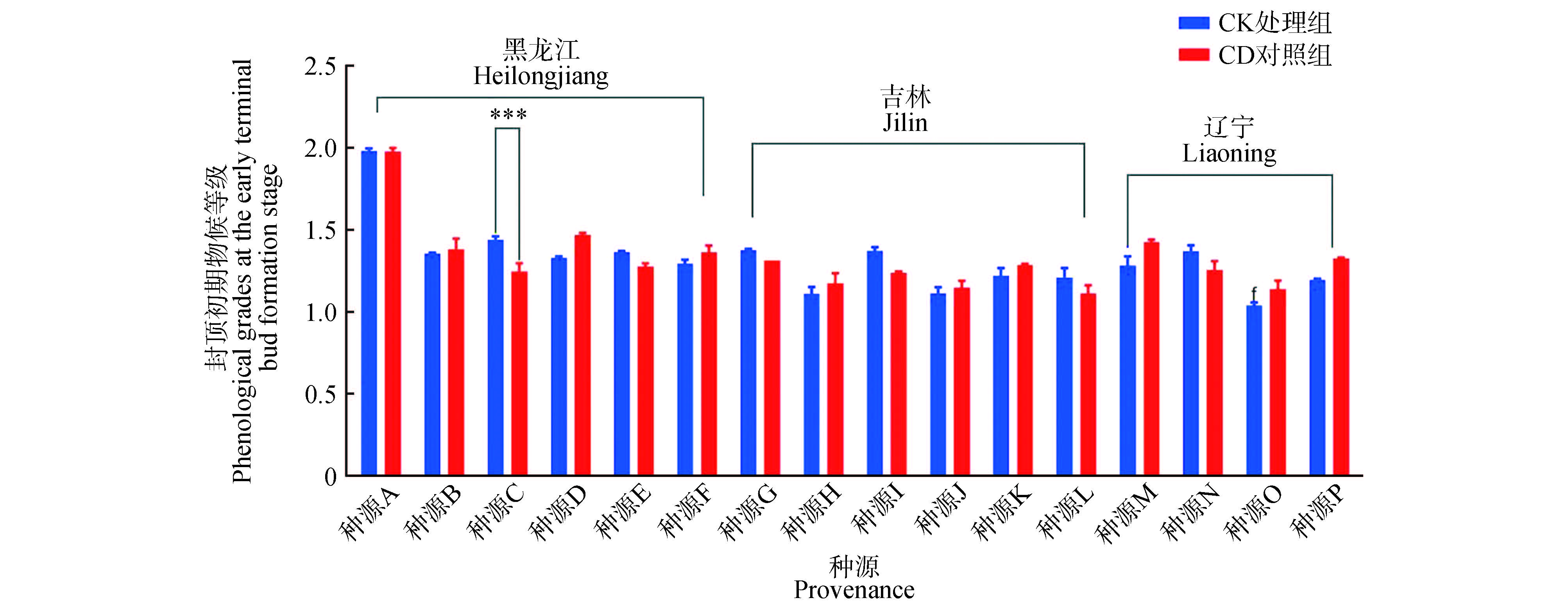
To explore the damage of late spring coldness stress to Fraxinus mandshurica from different provenances and screen out excellent cold-resistant provenances, two-year-old seedlings of 16 Fraxinus mandshurica provenances from Northeast China were used as experimental materials. After investigating differences in bud break phenology, artificial simulation of late spring coldness stress was applied to seedlings at the bud break stage (Level 2-3). Systematic analysis was conducted on freezing injury rate, phenology, growth, and key physiological and biochemical indices after stress, and correlation analysis was carried out in combination with climatic factors. The results showed that: there were highly significant differences in bud break stages among the 16 provenances, following the pattern that provenances from higher latitudes exhibited earlier bud break, while those from lower latitudes showed later bud break. Late spring coldness in the Maoershan Area mostly occurred from early or late May; during this period, seedlings at bud break stage Level 2-3 (new buds emerging to leaf expansion) suffered the most severe damage. The Amuer provenance reached bud break stage Level 4 on May 22, with fully expanded leaves, which could effectively avoid the damage of late spring coldness to new buds. After artificial simulation of late spring coldness stress, the freezing injury rate among provenances varied from 16.00% to 75.00% (average: 38.10%). The terminal bud set stage and leaf abscission stage were advanced, the growing period was shortened, and the increments of plant height and ground diameter decreased by 12.70% and 7.40%, respectively. Additionally, peroxidase (POD) activity and flavonoid content increased, while photosynthetic pigment and lignin contents decreased significantly. Based on the changes in growth, phenology, and key physiological and biochemical indices, as well as the correlation analysis between each index and climatic factors, three excellent late spring coldness-resistant provenances (Amuer, Dailing, and Nancha) were screened out at a selection intensity of 20%.
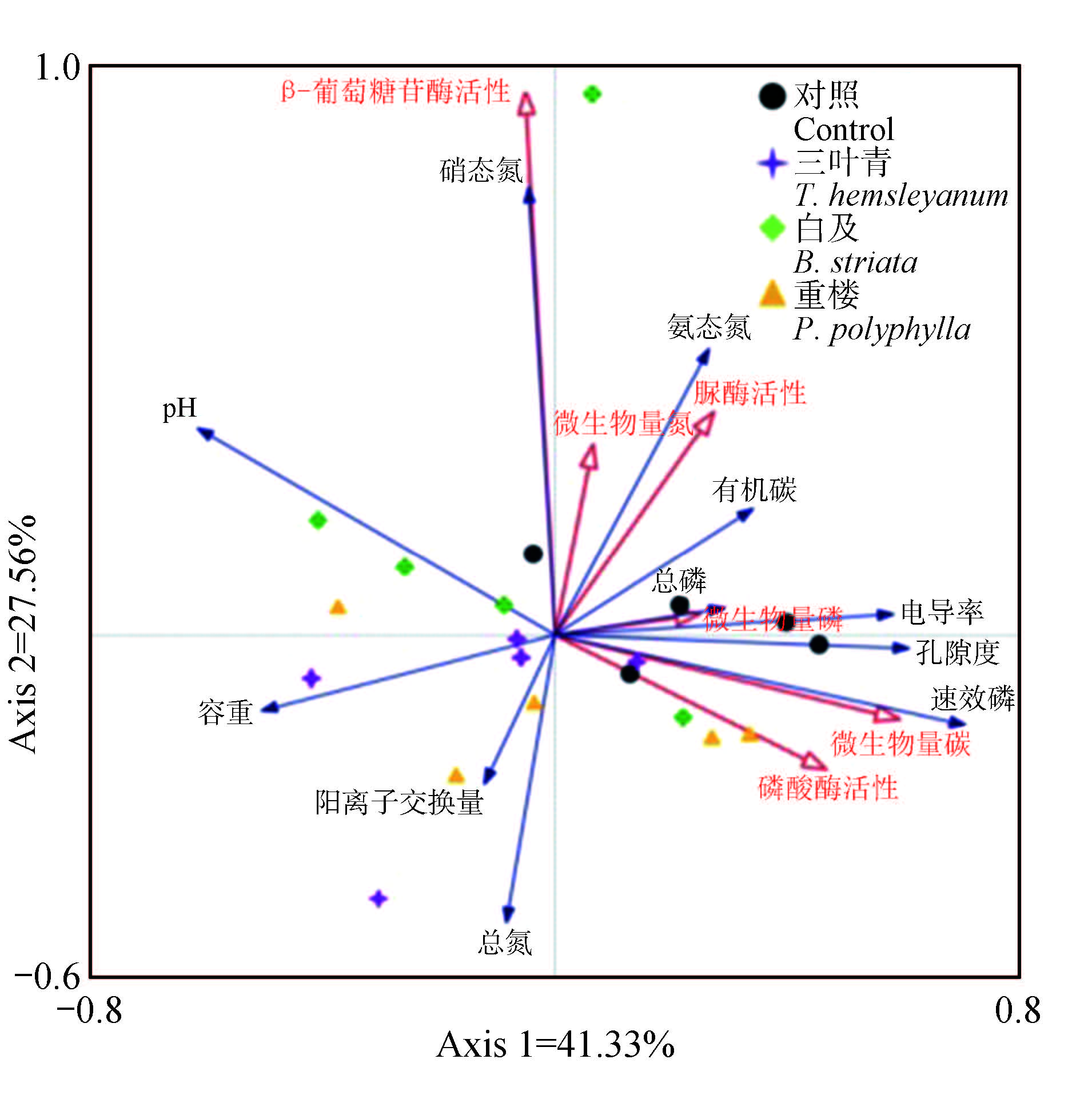
Exploring the impact of forest-medicine compound management on soil properties is currently a hot topic of concern in forest-medicine compound management. This study took the close-nature cultivation forest lands of understory cultivation of Tetrastigma hemsleyanum, Paris polyphylla, and Bletilla striata for 3.5 years as the objects, and used forest lands without planting medicine as a control, analyzed the effects of forest-medicine compound management on 17 parameters of soil physicochemical properties, microbial biomass, and extracellular enzyme activities. The results showed that: compared with the control, understory cultivation of B. striata increased soil pH (P<0.05). However, no significant changes were observed in soil electrical conductivity, bulk density, or porosity of understory cultivation. Soil organic carbon content in the B. striata and T. hemsleyanum groups were 26.48 g/kg and 23.83 g/kg, respectively, both significantly lower than the control 31.73 g/kg (P<0.05). Total nitrogen content in the P. polyphylla and T. hemsleyanum groups were 1.55 g/kg and 1.41 g/kg, respectively, significantly higher than the control 0.94 g/kg (P<0.05). No significant differences were observed in total phosphorus, cation exchange capacity, ammonium, nitrate, or other indicators. T. hemsleyanum, B. striata, and P. polyphylla significantly reduced soil microbial biomass carbon (P<0.05). P. polyphylla increased microbial biomass phosphorus and soil phosphatase activity (P<0.05). Z-score analysis indicated that T. hemsleyanum, P. polyphylla, and B. striata lowered the comprehensive score, among them, the comprehensive score of P. polyphylla was higher than T. hemsleyanum and B. striata, but the statistical differences were not significant. This study provides basis data support for the evaluation of the ecological impact and economic effects of understory medicine cultivation in subtropical forests.
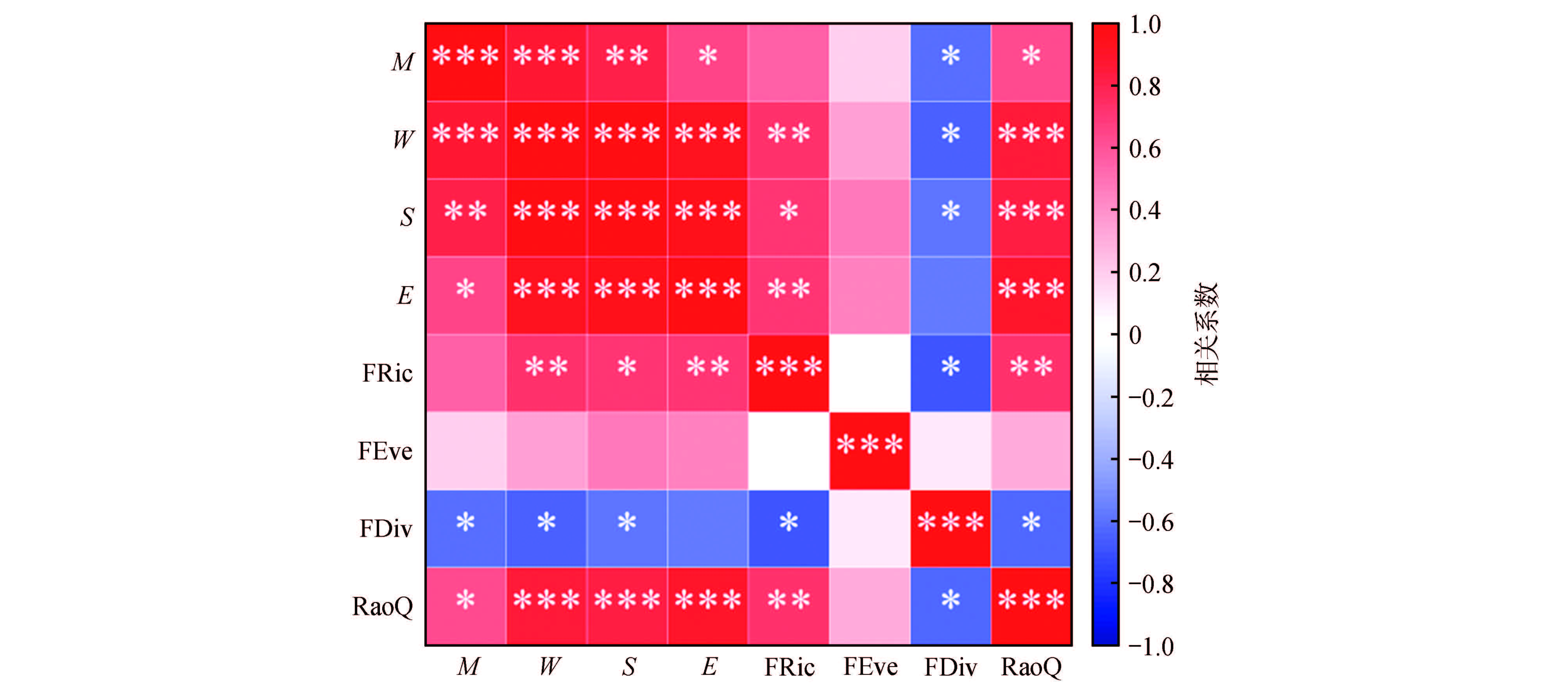
Species diversity and functional diversity are two key dimensions of biodiversity and play critical roles in influencing ecosystem functioning. This study investigated four typical forest types in the eastern mountainous region of Heilongjiang Province: Korean pine broadleaved forest (KH), spruce-fir forest (YLS), Mongolian oak forest (MGL), and larch forest (LYS). Multiple comparison, correlation analysis, and redundancy analysis were employed to compare the weighted plant functional traits, species diversity, functional diversity, and soil factors across different stands, as well as to explore their interrelationships. The results showed that leaf area and specific leaf area were significantly higher in KH and MGL than in YLS and LYS. Chlorophyll and leaf carbon content were significantly lower in MGL than in the other three forest types. The Margalef richness index, Shannon-Wiener diversity index, Simpson diversity index, and Pielou evenness index were significantly higher in KH, YLS, and LYS compared to MGL. The functional richness index (FRic) and Rao’s quadratic entropy index were highest in KH, while the functional divergence index (FDiv) was highest in MGL. No significant differences in the functional evenness index (FEve) were observed among the forest types. Soil pH and moisture content significantly influenced species diversity, and soil pH also had a significant effect on functional diversity. This study provides a theoretical basis for optimizing forest ecosystem community structure and maintaining biodiversity.
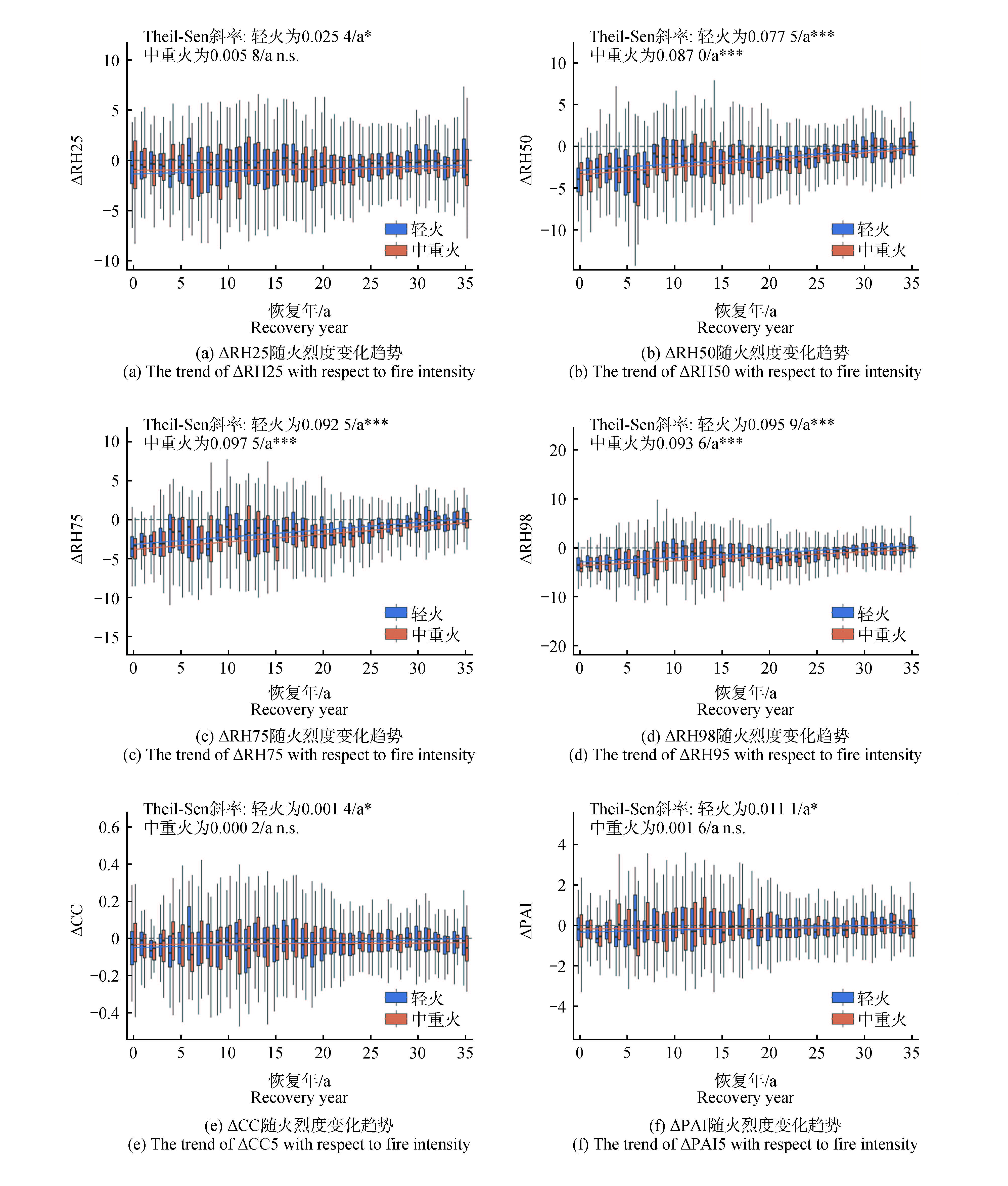
Forest fires are a major disturbance affecting the structure and functioning of forest ecosystems, and a systematic assessment of post-fire forest structural recovery is essential for regional ecological security and forest management. Taking fire-affected forests in Heilongjiang Province as the study area, this study used global ecosystem dynamics investigation (GEDI) LiDAR data combined with a space-for-time substitution approach to analyze the ecological recovery trajectories of forest vertical structure during 0-35 years after fire and their variability. Relative height metrics (RH25, RH50, RH75, and RH98), canopy cover (CC), and plant area index (PAI) were selected as structural indicators. Structural difference series between burned areas and adjacent unburned reference areas were constructed, and a 50 km × 50 km grid-based equal-weight aggregation scheme was applied. The robustness of forest structure recovery trends were evaluated using the Theil-Sen method together with spatial block resampling. Furthermore, the differences in post fire restroation trajectories and rates were compared by ecological zones (Great Khingan Mountains, Lesser Khingan Mountains, Changbai Mountains), as well as the recovery differences under varying fire severity levels. The results indicatd that post-fire forest structural recovery exhibits clear vertical stratification, with mid-canopy height (RH50) showing the strongest recovery signal, an average recovery rate of approximately 0.09 m/year, and a 35-year relative recovery ratio (RRR ) of about 0.33; upper-canopy and canopy-top height metrics (RH75 and RH98) also displayed significant recovery trends but with lower relative recovery ratios than the mid-canopy layer. Among canopy attributes, PAI exhibited a more pronounced long-term change signal than CC, suggesting differences in response stages and persistence among canopy properties during post-fire recovery. Fire severity had a significant influence on structural recovery, as moderate- to high-severity burned areas showed non-significant recovery trends in lower-canopy height and canopy attributes, with substantially lower long-term recovery strength than low-severity burned areas. The comparison of ecological zones showed that there were significant differences in the recovery rate and relative recovery degree among the three major ecological zones, mainly reflected in the RH24, CC and PAI indicators. Among them,the recovery rate in the Changbai Mountain area was generally higher, while the restoration of the Great Khingan Mountains was more restricted in the low-level and canopy attribute indicators. This study demonstrates that GEDI LiDAR-derived structural parameters can effectively characterize long-term post-fire forest structural recovery at the regional scale, providing a scientific basis for post-fire forest recovery assessment and forest management.
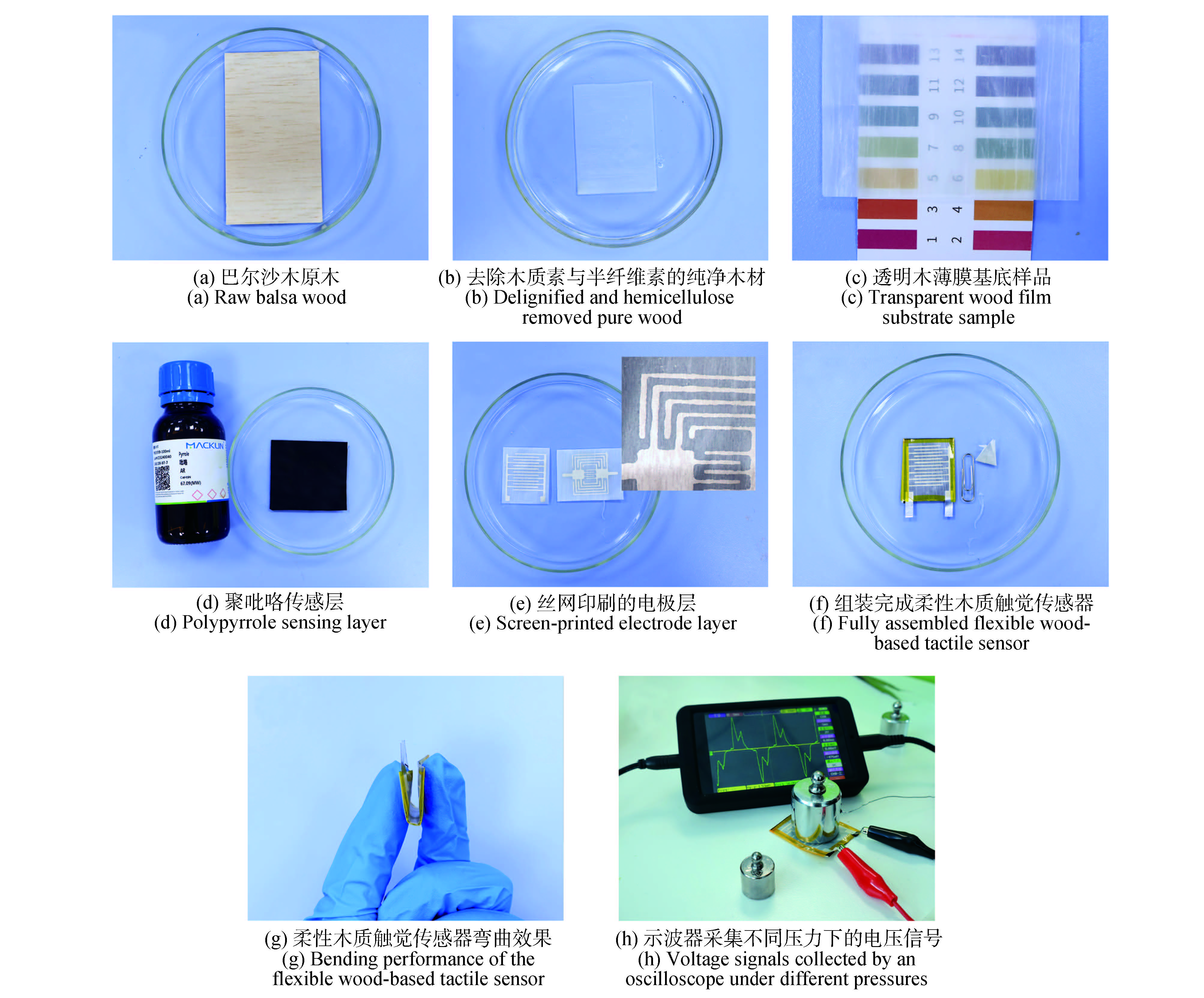
Developing flexible tactile sensors that combine environmental friendliness, unique aesthetic tactile qualities, and high performance is crucial for advancing sustainable human-computer interaction technologies. This paper presents a new strategy for fabricating flexible tactile sensors based on natural wood. The method begins with the delignification and hemicellulose removal of natural wood to obtain a flexible, transparent wood template that retains its micro-porous structure. Subsequently, polypyrrole is uniformly loaded inside the template via in-situ polymerization, and patterning is achieved using conductive silver paste to create a sandwich-structured sensor. This sensor not only preserves the tactile and mechanical flexibility of the wood but also enables high-precision pressure sensing, providing a reliable solution for flexible tactile interactive interfaces. The performance evaluation results indicate that the wood-based flexible sensor can stably perform preliminary data processing through its intrinsic nonlinear dynamic response under different pressures ranging from 2 kPa to 10 kPa. Furthermore, this study highlights its potential applications in interactive interfaces and wearable devices. The proposed scalable and efficient wood functionalization strategy offers a flexible, high-performance, and environmentally friendly tactile sensing solution. It also paves the way for the design of interactive systems that balance material sustainability, aesthetic value, and tactile functionality.
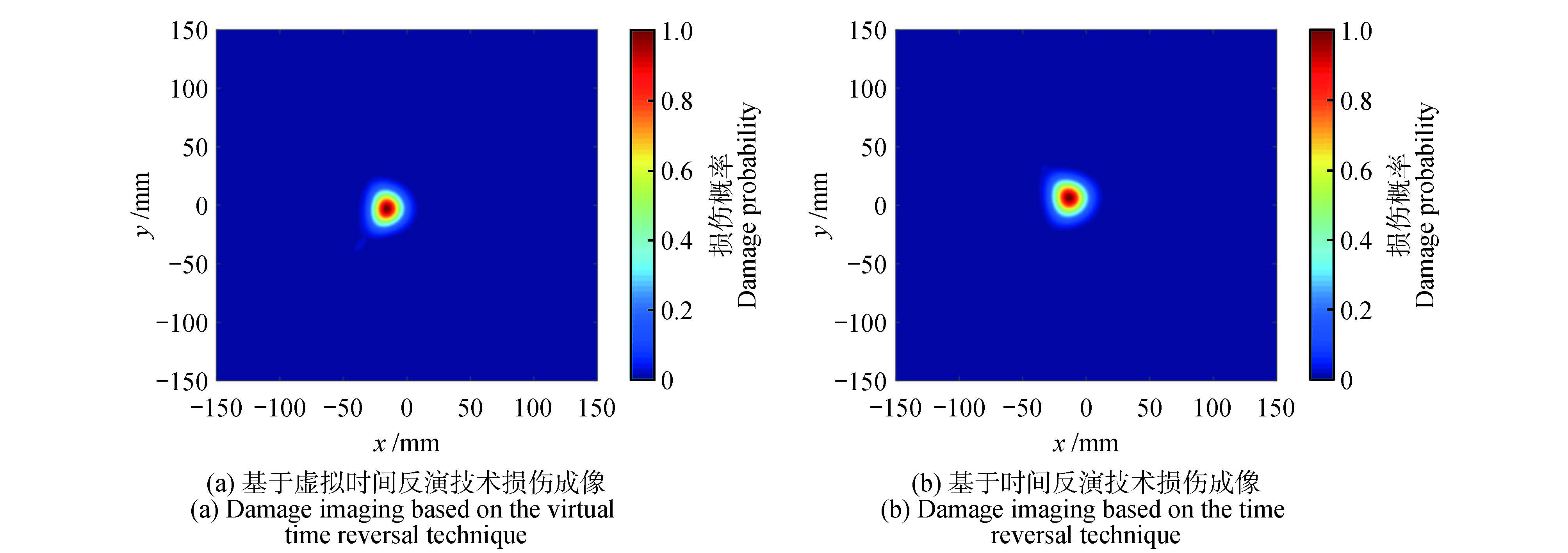
Aiming at the problem of requiring two excitation signals in traditional time-reversal algorithms, a method is proposed to simplify experimental procedures while improving the accuracy of damage localization in wooden boards. A single-input single-receive virtual time reversal (VTR) technique is developed, which replaces the physical time-reversal process with signal operations. The correlation coefficient between the reconstructed signal obtained via virtual time reversal and the excitation signal is defined as a damage index (D s) . Combined with ultrasonic probabilistic imaging, this method enables precise localization of damage in wooden boards. Numerical simulations and experiments demonstrate that signals can achieve virtual focusing at the damage locations, significantly enhancing localization accuracy. The VTR technique not only streamlines the experimental process but also effectively improves damage localization, providing a practical reference for engineering applications.
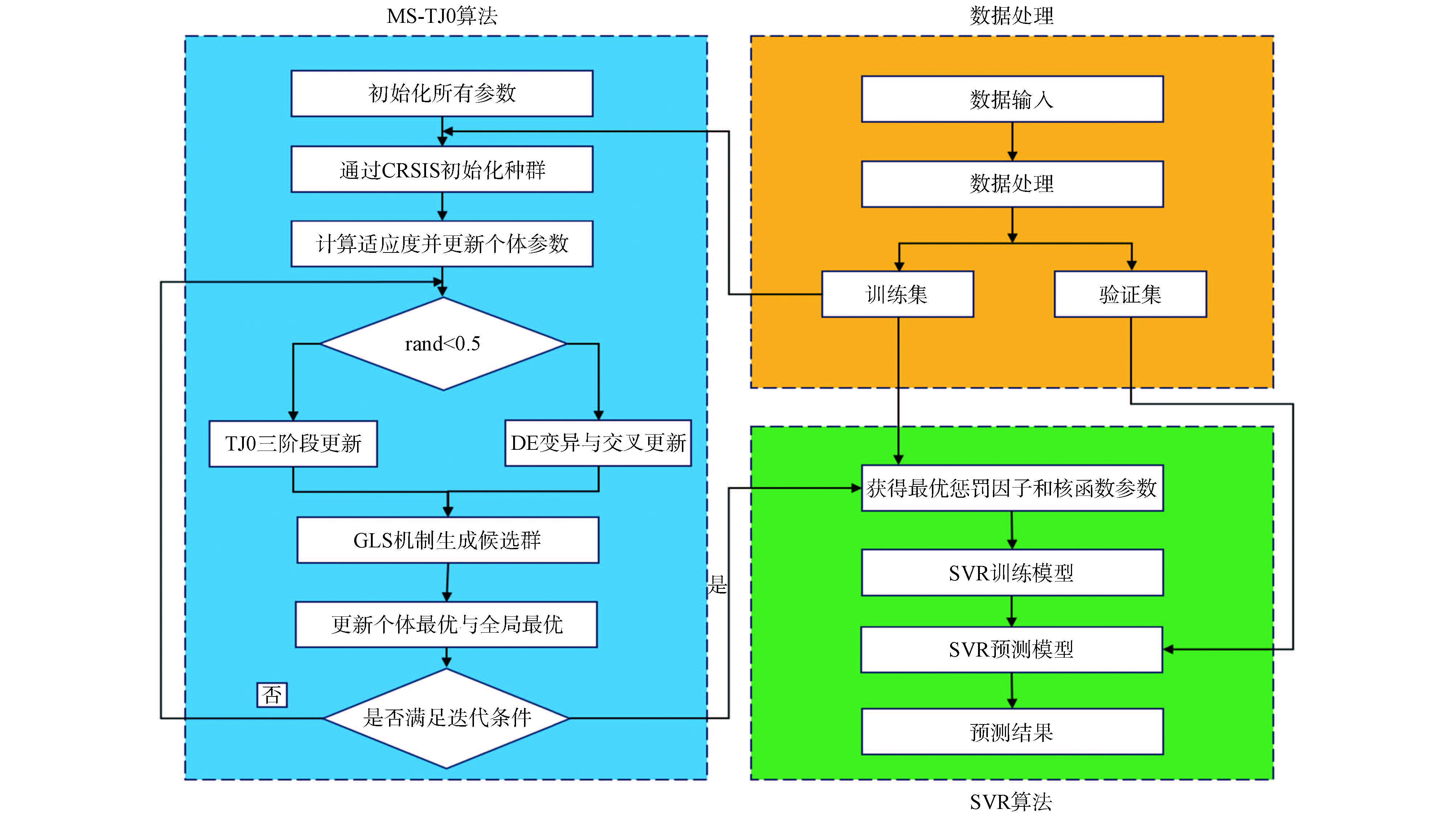
In the hot-press molding process of reconstituted bamboo, the coupling of multiple process parameters, reliance on empirical parameter adjustment, and high trial-and-error costs make it necessary to establish a quantitative mapping relationship between process parameters and quality indicators, and further realize reverse prediction of parameters for target performance. To address this issue, a support vector regression(SVR) method optimized by a multi-strategy (MS) traffic jam optimization(TJO) algorithm, namely MS-TJO-SVR, is proposed to develop a bidirectional prediction model for the process parameters and quality indicators of reconstituted bamboo. In the forward prediction, density, moisture content, adhesive content, and pressure holding time are used as input process parameters, while modulus of rupture, horizontal shear strength, water absorption width swelling rate, and water absorption thickness swelling rate are used as output quality indicators. In the reverse prediction, the quality indicators are used as inputs to predict the corresponding process parameters. By jointly optimizing the key hyperparameters of SVR, MS-TJO enhances the model’s ability to characterize nonlinear relationships and improves prediction stability. The results indicate that MS-TJO-SVR achieves high fitting accuracy and low prediction error in both forward and reverse prediction tasks, and outperforms traditional SVR and other optimized SVR methods in overall performance. This study provides an effective modeling tool and methodological reference for process parameter optimization and quality prediction in the hot-press molding of reconstituted bamboo.
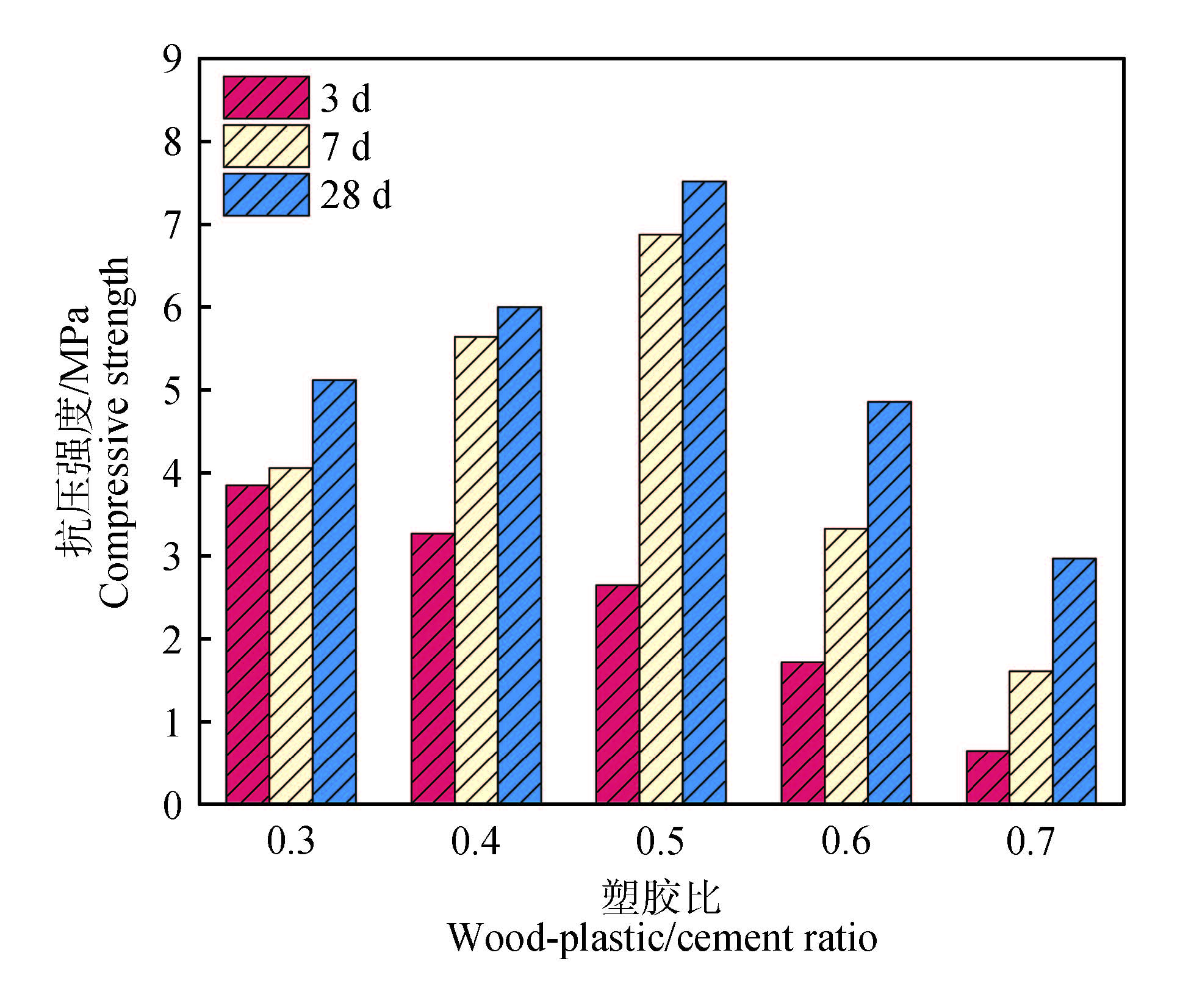
To promote high-value utilization of wood waste, using wood flour made from waste wood and wood-plastic (WP) aggregate made from recycled polyethylene granules, together with calcium sulfoaluminate (CSA) cement to prepare wood-plastic lightweight aggregate ecological floating islands (WPC-EF). Using the plastic-to-cement ratio (P/C) as the primary control variable, quantified alkalinity, mechanical properties, porosity, permeability, biofilm attachment, and wastewater purification performance. The results showed that, as P/C increased, the concrete alkalinity decreased from 9.1 to 8.1. Compressive strength followed a pattern of increasing first and then decreasing, reaching a maximum at P/C=0.5, where the 3-28 d strengths increased form 2.65 MPa to 7.81 MPa. With increasing P/C, connected porosity increased from 22.9% to 44.3%, and total porosity increased from 35.7% to 53.7%. The permeability coefficient reached its maximum (4.85 cm/s) at P/C=0.5, coinciding with the highest biofilm mass and the most advanced community development. For wastewater treatment, the specimen with P/C=0.5 exhibited the best overall removal performance, achieving removal efficiencies of 72.15%, 86.7%, and 83.1% for -N, TN, and TP, respectively. In summary, P/C=0.5 provides a favorable balance between load-bearing capacity and ecological function, offering effective technical support for the preparation and engineering application of ecological floating islands.
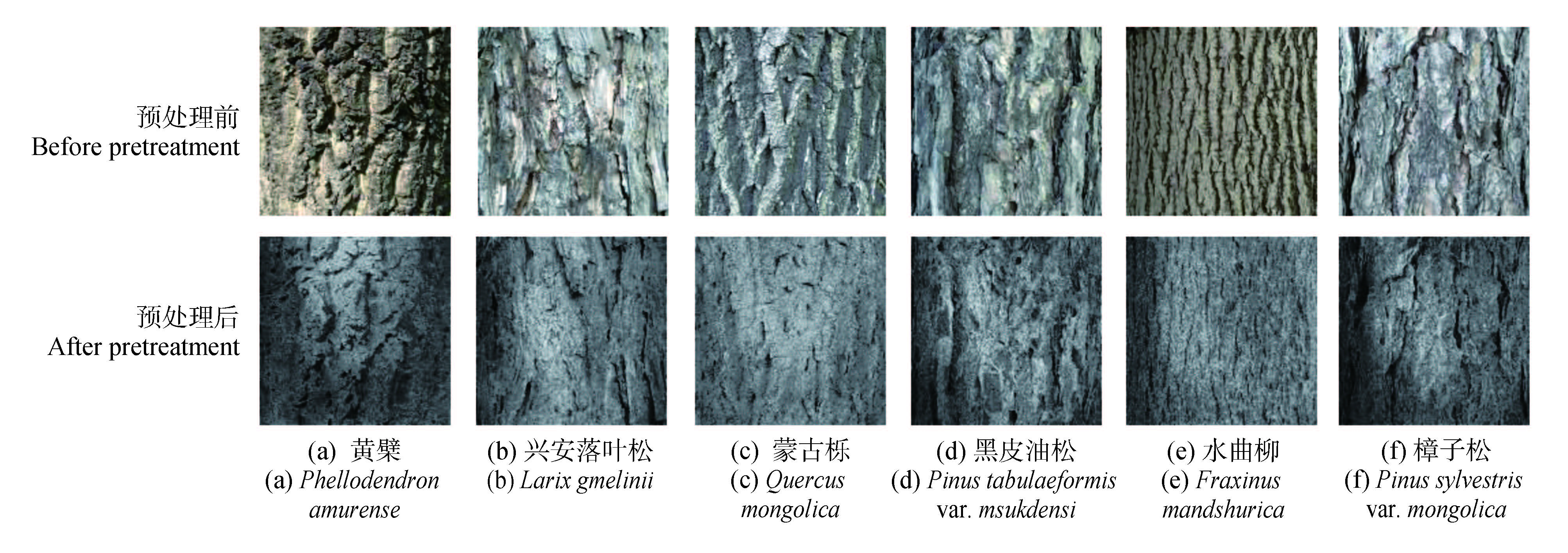
A bark image recognition model with both high precision and lightweight feature extraction capabilities is constructed to achieve efficient tree species classification on the premise of maintaining low computational overhead, and the model structure is designed to enhance the model's ability to express texture features, and ultimately improve its overall recognition performance. A dual-branch lightweight recognition model DenseShuffle _ ECA is designed, which is composed of two feature extraction branches, DenseNet121 and ShuffleNetV2. The DenseNet branch focuses on deep semantic feature extraction, while the ShuffleNet branch is used to obtain efficient texture features to reduce the overall number of parameters and computational complexity. The efficient channel attention (ECA) module is embedded in the DenseNet branch, and the key recognition features are strengthened by adaptive channel weights. The output features of the two branches are spliced and fused in the channel dimension, and the classification prediction is completed through the Dropout and full connection layers. The model is trained, verified and tested on a self-built bark image data set. It contains Phellodendron amurense, Larix gmelinii, Quercus mongolica, Pinus tabulaeformis var. mukdensis, Fraxinus mandshurica and Pinus sylvestris var. mongolica 3 514 bark images of 6 main tree species in Northeast China. In order to evaluate the performance of the model, several groups of comparative experiments are set up, including the performance comparison with five classical networks, AlexNet, DenseNet, GhostNet, MobileNetV3 and ShuffleNetV2, and the effect comparison of three feature fusion strategies, namely, splicing fusion, average fusion and weighted fusion. As well as the effect comparison test of different embedding modes of ECA module. In addition, label smoothing is introduced to suppress overfitting and improve the generalization ability of the model. The results show that, 1) the DenseShuffle_ECA model achieves the best performance in both accuracy and weighted F1 score, with an overall average accuracy of 98. 87%, which is significantly better than five comparison models while maintaining a low computational cost, of which DenseNet is about 3. 2% higher than baseline model. Compared with the baseline model ShuffleNetV2, it is improved by about 9.3%. 2)Tthe splicing and fusion strategy is the best in performance and stability, and the recognition accuracy is the highest when the ECA module is integrated into the DenseNet branch (ECA_dense_only), reaching 98.06%. 3) The introduction of label smoothing effectively improves the generalization ability of the model, and the recognition accuracy reaches 98.28%. Through the model of dual-branch feature extraction, channel attention enhancement and efficient fusion mechanism, DenseShuffle_ECA, the depth expression and accurate classification of bark image features are realized, which is outstanding in accuracy, computational efficiency and stability. It provides a lightweight and reliable technical solution for the establishment of portable timber trade, forestry survey and forest intelligent monitoring and recognition system.
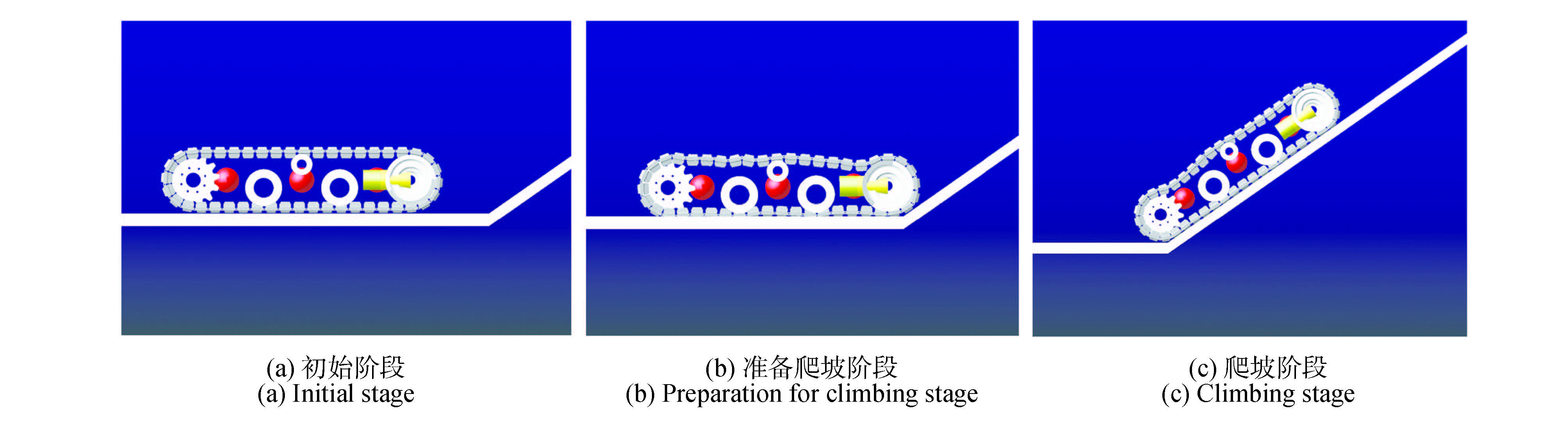
In response to the needs of young and middle-aged forest tending operations in hilly and mountainous areas, a crawler traveling device for a mower was designed, and its key parameters were determined. Using 3D mechanical design software (solidworks, SOLIDWORKS) and automatic dynamic analysis of mechanical systems (ADAMS) software, a three-dimensional model and a dynamic model of the crawler traveling device were established. The passability of the crawler traveling device in hilly terrain was verified by simulation analysis, and the simulation results were optimized. The results showed that the crawler traveling device can maintain stable traction on a slope with a gradient of 35°; it can smoothly cross a 150 mm vertical obstacle without tipping over; and it can maintain good stability when crossing a gully 500 mm wide; the centroid displacement and velocity fluctuation amplitude of the optimized traveling device were reduced, and the stability was improved. The crawler traveling device demonstrates excellent passability and stability in complex terrain, effectively solving the problems of poor passability and insufficient stability of mowers in hilly and mountainous areas. It is of great significance for improving the level of forestry mechanization in these regions.
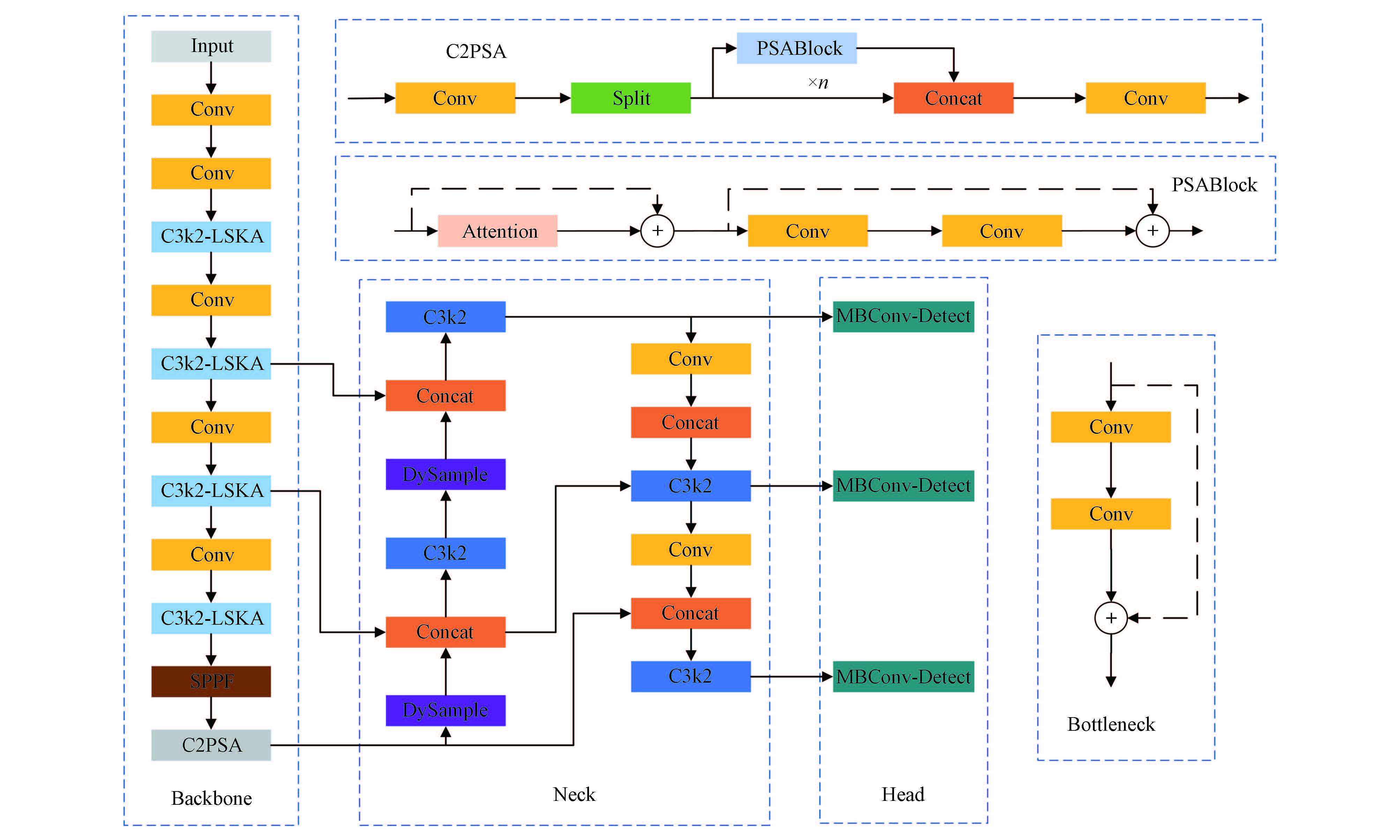
To address the detection difficulty of small-diameter tree trunks in complex forest stands—characterized by slender shapes, frequent occlusion, and high similarity to background textures—this study proposes a lightweight improved model, termed LDM-YOLO, built upon YOLO11n using a self-constructed small-diameter tree image dataset. The acronym LDM is derived from LSKA (large separable kernel attention), DySample dynamic upsampling, and MBConv-Detect. Specifically, a C3k2-LSKA module (cross-stage partial network bottleneck with two convolutions integrated with large separable kernel attention) is introduced into the Backbone to enhance the representation of slender trunks and their contextual features. In the Neck, DySample dynamic upsampling is adopted to refine multi-scale feature alignment. Moreover, an MBConv-Detect structure (mobile inverted bottleneck convolution–detection head) is applied to the regression branch of the detection head to reduce parameter count and computational cost. Experimental results on the self-built dataset show that LDM-YOLO improves mAP50 and mAP50–95 by 3.1 and 2.3 percentage points, respectively, compared with YOLO11n, while reducing GFLOPs from 6.3 G to 5.1 G, thereby achieving higher detection accuracy under low inference overhead. Compared with representative methods such as Faster R-CNN, YOLOv5n, YOLOv8n, and YOLOv10n, LDM-YOLO delivers superior overall detection performance at comparable or lower computational complexity. The results demonstrate that the proposed model better balances accuracy and lightweight design for small-diameter tree detection, providing a useful reference for subsequent forestry intelligent equipment applications on resource-constrained platforms.
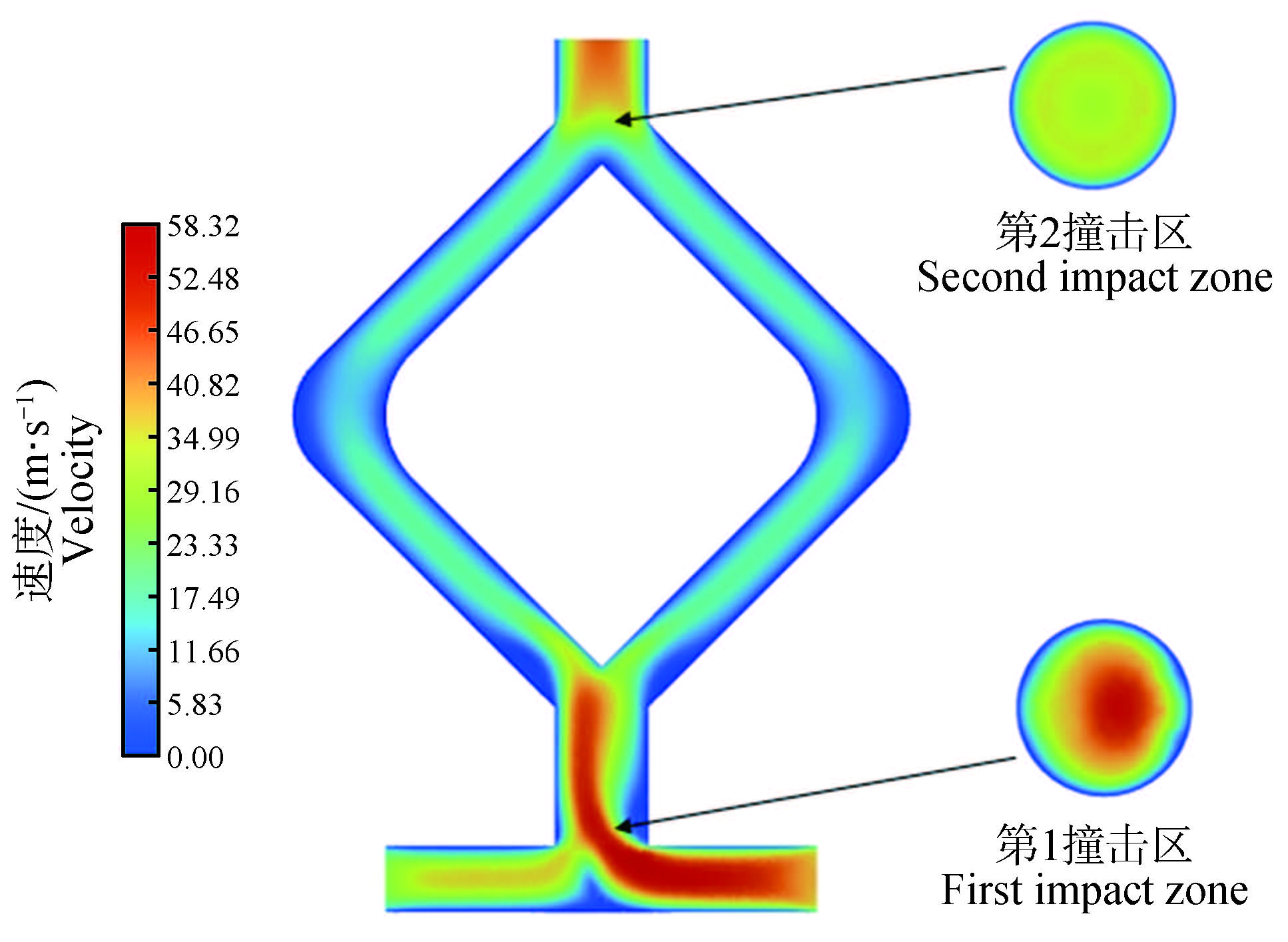
To address the issue of insufficient mixing of components A and B in polyurea spray coating for wooden furniture, which easily leads to coating defects, a ‘1T2Y’ (one T-shaped chamber and two Y-shaped chambers) dual-impact mixing chamber structure is proposed and validated to improve in-chamber mixing uniformity and outlet stability. Three-dimensional models of 1T (one T-shaped chamber), 1Y (one Y-shaped chamber), and 1T2Y were established and compared through simulations in ANSYS Fluent. Parameters such as fluid velocity, pressure, density, turbulence intensity, and mixing index of polyurea components A and B around the mixing chamber were studied. In the 1T2Y design, multiple pressure drop peaks and symmetrical vortices were generated at the T-shaped impact and dual Y-shaped recombination points, forming a coupling mixing mechanism of ‘stretching, folding, and suction’. The density along the flow path transitioned from a steep interface to uniform, with the midsection of the Y-branch around 1,250–1,260 kg/m³ and the outlet distribution being most uniform. The peak turbulence intensity was about 2,000%, rapidly decaying within the branches and briefly rising before the outlet, then stabilizing. The study showed that reasonably combining T-shaped and Y-shaped structures can improve the mixing effect of the chamber. Compared with 1T and 1Y, the 1T2Y design had the best axial symmetry of the outlet velocity field, minimal skewed flow, significantly improved mixing index, and excellent mixing effect. The residence time of the mixed fluid in the chamber was about 0.15 s, meeting the rapid reaction requirements of polyurea. These results provide a reference for the structural optimization and engineering application of woodworking polyurea spray gun mixing chambers, offering new design ideas for improving the surface coating quality and consistency of wooden furniture.
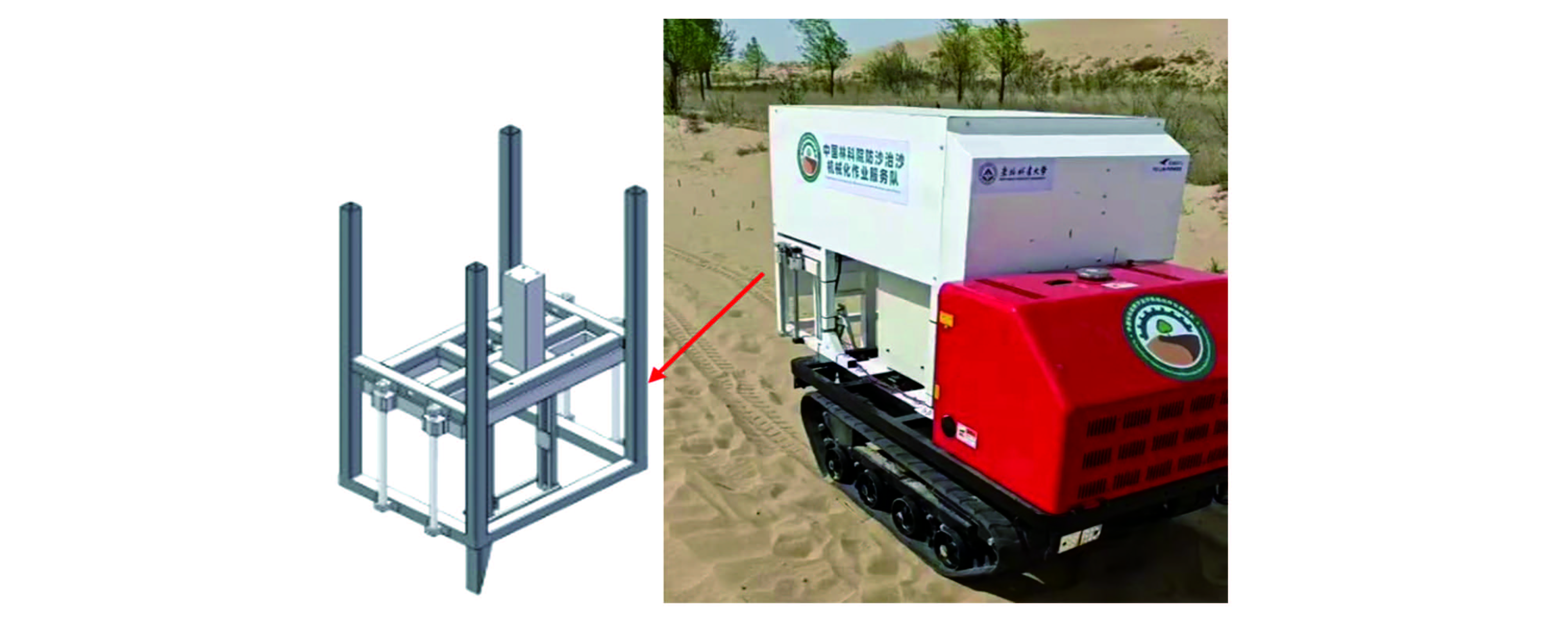
To address the repetitive positioning error of the four-column guide pair in a self-propelled desert tree planting machine under harsh conditions, this study investigated the effects of assembly errors, structural parameters, and friction characteristics on positioning accuracy. A mathematical error transfer model considering the coupling of assembly errors and elastic deformation was established. Based on Adams simulations, the effects of guide rail verticality (0°, +1°, +2°), slider spacing (100, 175, 250 mm), and friction coefficient on system forces and positioning accuracy were analyzed. A three-factor, three-level orthogonal experiment was designed, and an experimental platform was built for validation. Results showed that when verticality increased from 0°to 2°, slider force rose by 190%. Increasing slider spacing from 100 mm to 250 mm reduced system force by 67% and improved accuracy by 87%. When the static friction coefficient exceeded 0.3, creeping occurred and friction increased by 45%. ANOVA indicated verticality, spacing, and friction had significant impacts. The optimal parameters were: verticality within ±1°, spacing 250 mm, and static friction coefficient ≤0.2. The results provide guidance for improving the precision of desert tree planting machinery.
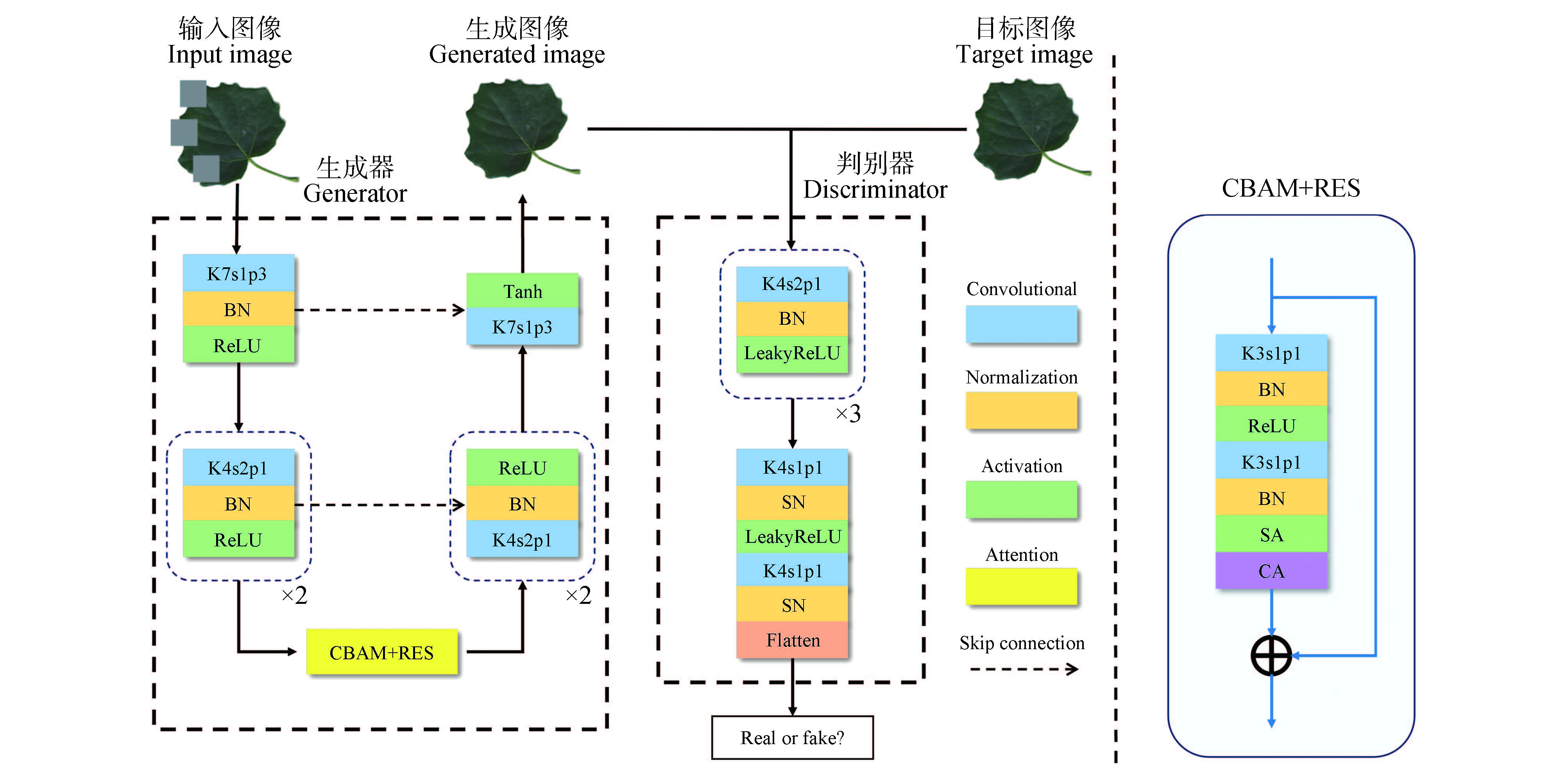
Accurately quantifying the insect-damaged leaf areas is a core component in applied reaserch such as pest control, plant resistance breeding, nad genetic screening. However, leaves in natural environments are susceptible to insect feeding, resulting in irregular damage. To address the problem of insect-damaged leaf areas reconstruction, this paper proposed an image completion method based on Pix2Pix (image-to-image translation with conditional adversarial networks). Firstly, a residual structure and a convolutional block attention module (CBAM) were introduced into the generator to enhance the network's feature extraction and representation capabilities. Subsequently, the original discriminator was replaced with a WGAN-GP discriminator incorporated with spectral normalization (SN) to improve the stability of model training. The results indicated that, compared with the original model, the improved algorithm achieved an increase of 4.4% in structural similarity (SSIM), an increase of 13.8% in peak signal-to-noise ratio (PSNR), and a reduction of 53.7% in learned perceptual image patch similarity (LPIPS). This method can achieve restoration results with clearer leaf vein textures and better preservation of semantic structural consistency at leaf margins, providing technical support for the extraction of plant leaf phenotypic parameters.
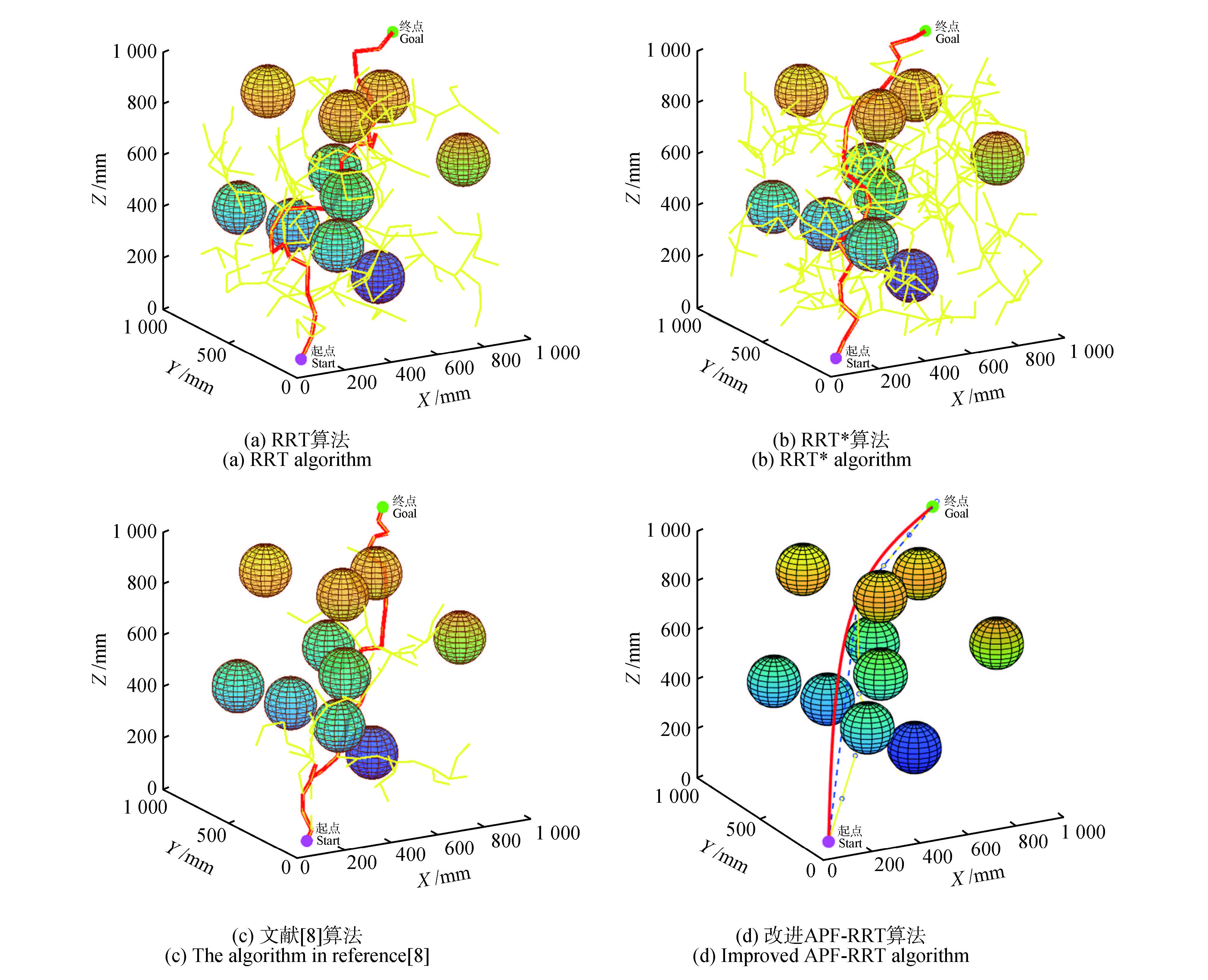
Forest fruit harvesting still relies heavily on manual labor, which suffers from low efficiency, high production costs, and certain safety risks. The development and application of forest fruit-harvesting robotic arms are therefore imperative. Obstacle avoidance path planning is a critical aspect of robotic arm operations. The RRT algorithm, as a commonly used path planning method, suffers from issues such as low search efficiency, high planning costs, and excessively convoluted and lengthy planned paths. This paper proposes an improved APF-RRT algorithm based on a multi-strategy fusion approach. The approach introduces a dynamic target bias strategy into the RRT algorithm, integrates an improved artificial potential field method to guide the random tree expansion toward the target point, and combines an adaptive step-size adjustment strategy to improve algorithm performance. Additionally, the initial path is optimized through pruning and smoothing to eliminate redundant nodes and enhance path quality. Using Matlab for comparative simulation experiments,the three-dimensional space simulation results demonstrate that the improved APF-RRT algorithm reduces search time by 90.91%, 96.92%, and 77.78% compared to RRT, RRT*, and the algorithm in reference [
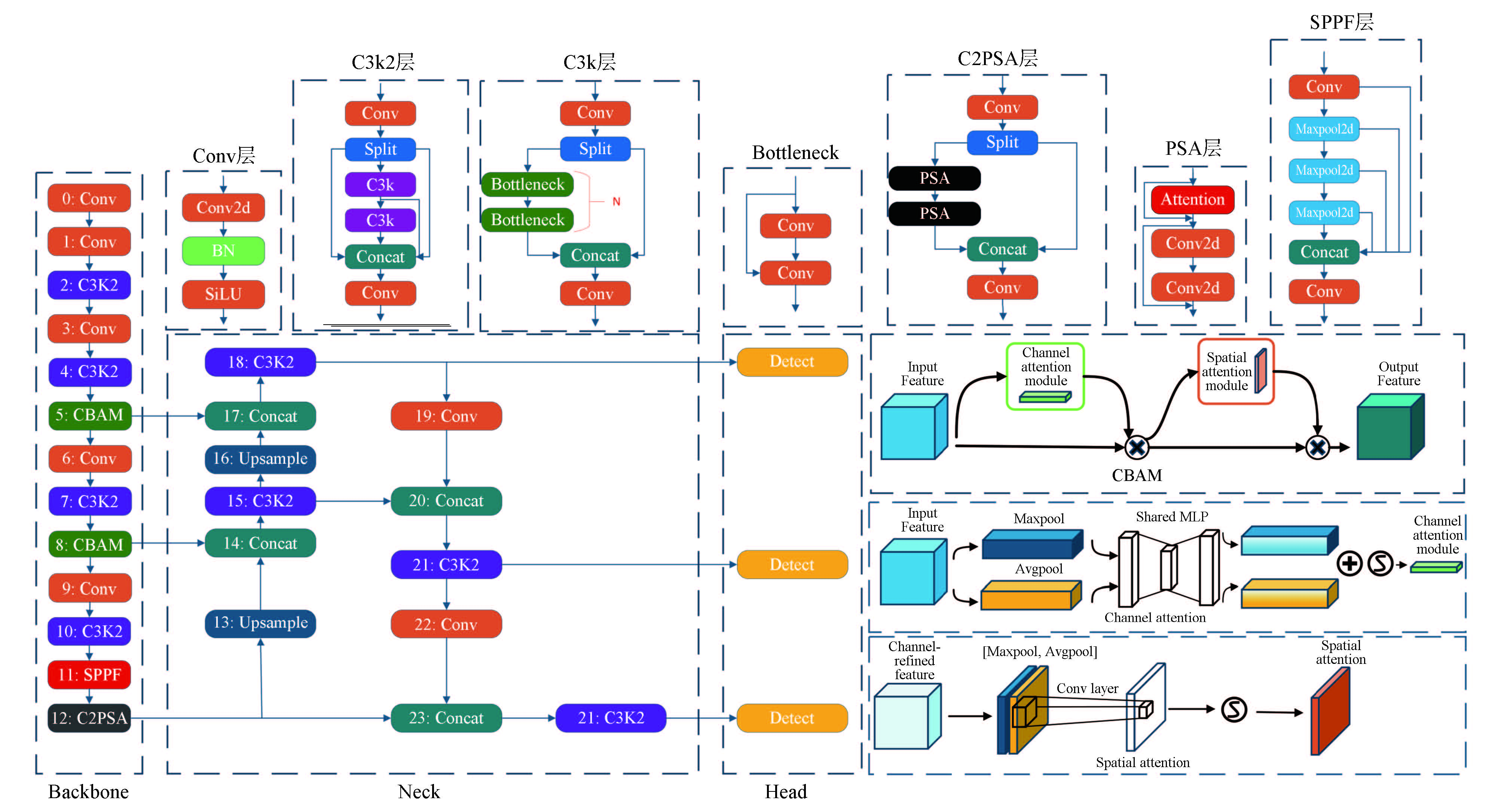
High-efficiency and precise identification of young apple fruits is a crucial prerequisite for automated mechanical thinning. Addressing recognition challenges caused by insufficient light, leaf obstruction, and fruit clustering, this paper proposes a recognition algorithm based on YOLO11n enhanced through dual-dimensional improvements: transfer learning and attention mechanisms. The goal is to enhance the accuracy and generalization of automated thinning machinery in complex field environments. The algorithm construction approach is as follows: build and annotate an image dataset of young apple fruits covering multiple time periods, angles, and diverse field environments to provide high-quality samples for model training; utilize transfer learning to fine-tune and optimize the YOLO11n model, enhancing its generalization capability for real-world scene recognition; incorporate the convolutional attention module into the optimally tuned baseline YOLO11n model to construct the YOLO11n-CBAM enhanced model, thereby strengthening the model's key feature extraction capabilities and target region focus abilities. Experiments demonstrate that the YOLO11n model under transfer learning achieves a precision (P) of 97.33%, a recall (R) of 88.01%, a mean average precision at 50% (mAP50) of 95.00%, and a mean average precision at 50%-95% (mAP50-95) of 69.12%. These results significantly outperform other models under transfer learning and comparable models with random weights. CBAM model further enhances YOLO11n's metrics, achieving 99.07% of precision, 88.81% of recall, 95.87% of mAP50, and 71.02% ofmAP50-95, while demonstrating superior interference resistance in complex field environments. The improved model significantly enhances the accuracy of young apple fruit recognition while maintaining high generalization capabilities, providing effective technical support for automated mechanical thinning.
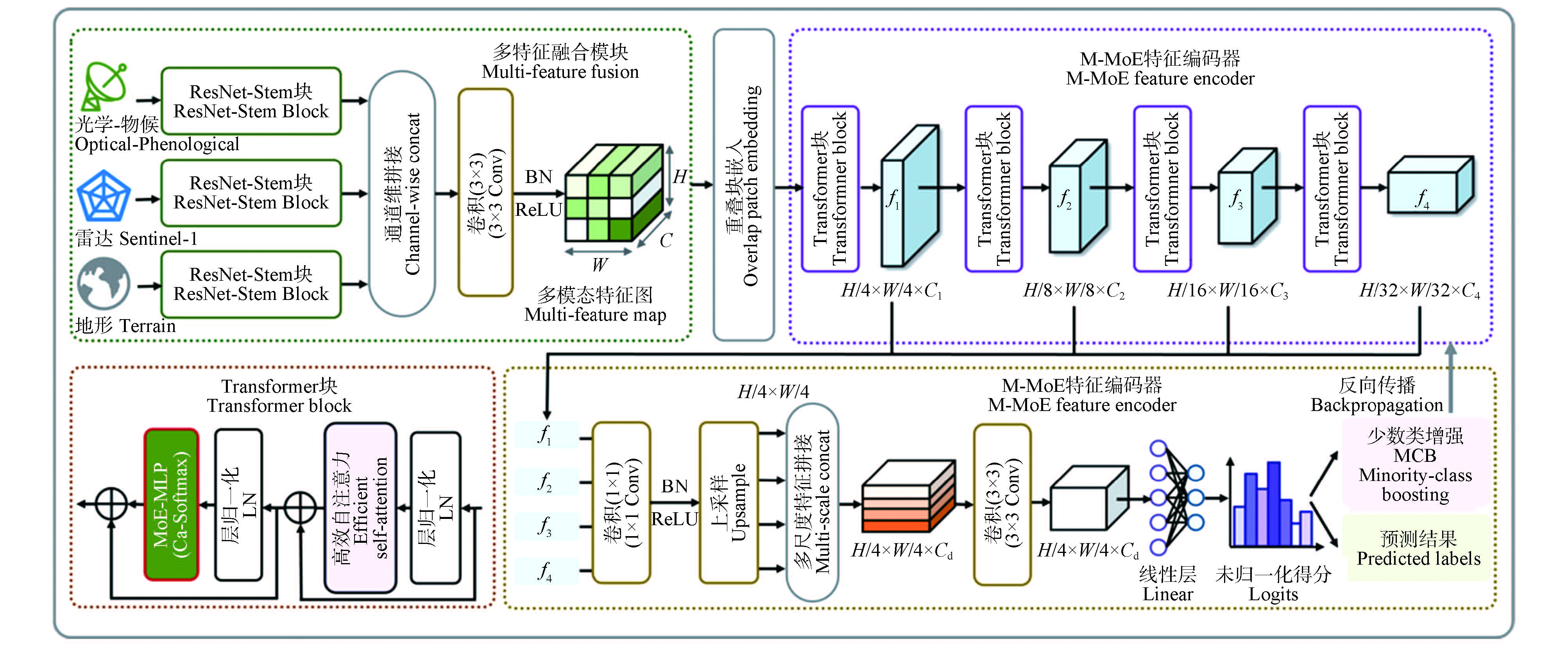
Dominant tree species classification is an important basis for fine-scale forest resource monitoring and ecological assessment at the regional scale. In medium-resolution remote sensing scenarios, mixed pixels and boundary transition effects are prominent, resulting in unstable class discrimination in mixed forest areas. Meanwhile, the training data exhibit substantial imbalance in the sample proportions of different tree species categories, and categories with lower sample proportions are more prone to omission errors, spatial fragmentation, and boundary drift. To address these issues, this study constructs a multimodal input framework integrating optical data, radar data, and topographic factors, and proposes a multimodal sparse mixture-of-experts network, termed M-MoENet. The proposed method designs a lightweight hierarchical fusion module to perform modality-specific convolutional encoding and progressive fusion, thereby obtaining unified feature representations. A sparse MoE-MLP is introduced into the feed-forward sublayer of the encoder, and confidence-adjusted gating is employed to achieve adaptive expert activation. In addition, a training constraint oriented toward low-proportion categories is incorporated to alleviate dominant-class bias and improve the effective learning of minority classes. Experimental results show that M-MoENet achieves the best overall performance, with OA, mIoU, and Kappa reaching 79.46%, 60.08%, and 0.74, respectively, and yields more pronounced improvements for minority classes such as evergreen pine and linden. These results demonstrate that the proposed method can improve the classification accuracy of dominant tree species under multimodal conditions and class-imbalance settings, providing an effective solution for dominant tree species classification in complex forest regions.
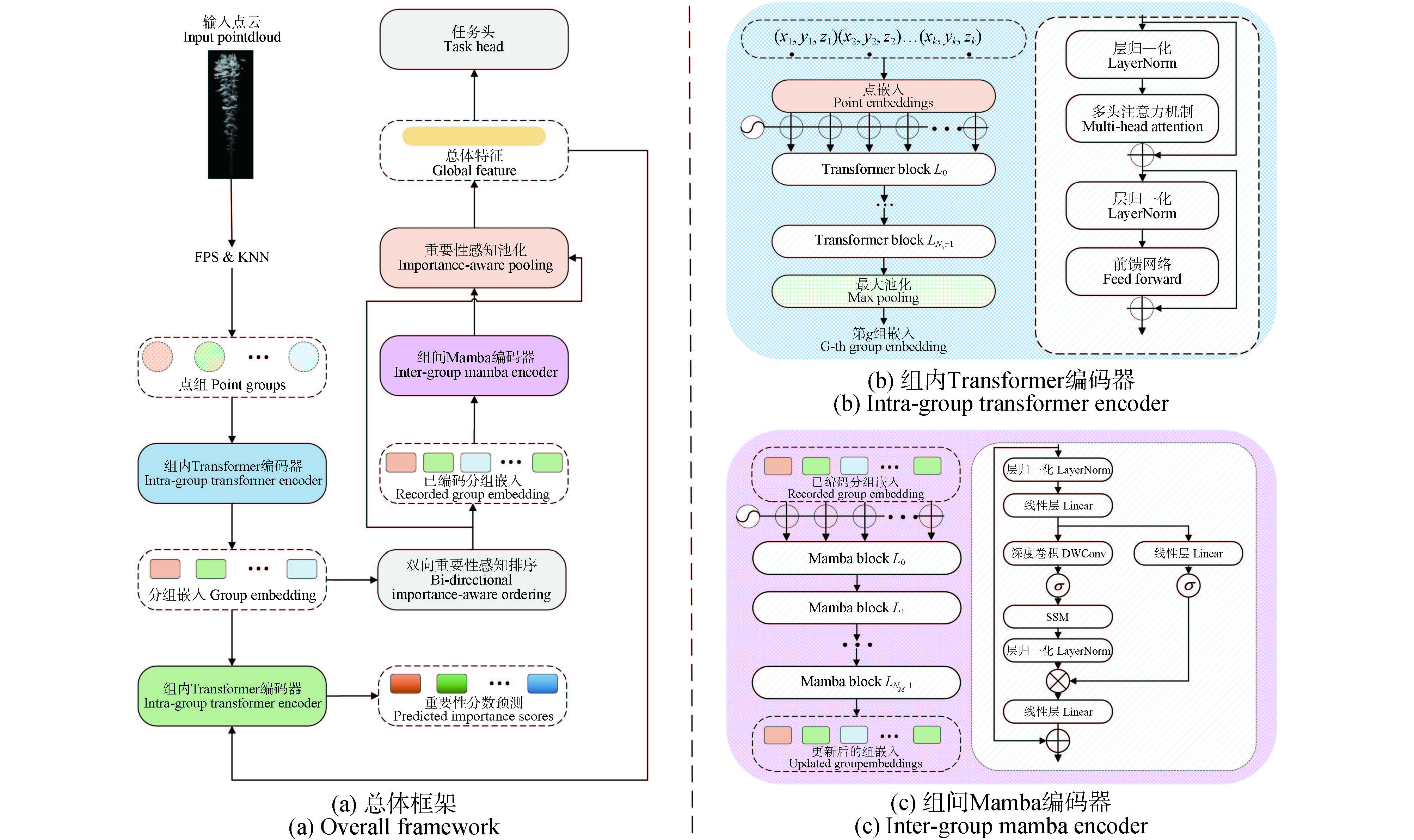
To effectively utilize forest point cloud data for estimating forest carbon sinks, it is crucial to achieve accurate and efficient separation of leaf and branch point clouds. Forest point clouds are characterized by strong overlap, complex features, and massive data volume. Existing research methods face challenges such as high computational costs, reliance on tree geometric and spectral features, and weak cross-species generalization capabilities. To address these challenges, this paper proposes the use of the PoinTramba method, which employs Transformer and Mamba to model intra-group and inter-group relationships, respectively. Based on the PoinTramba framework, we further improve its grouping strategy and adjust the BIO strategy to adapt to the characteristics of forest point clouds, enabling it to handle the heterogeneous data of forest point clouds while enhancing cross-species generalization. Experimental results show that the proposed method achieves 94.20% OA (overall accuracy), 85.53% mIoU (mean intersection over union), and 87.37% mAcc (mean accuracy) on the test set, demonstrating significant improvements compared to Transformer-based methods. Additionally, the practical effects of the grouping strategy and BIO strategy adopted in this paper are analyzed, showing certain advantages over the basic PoinTramba method and other improvement measures.